Größer, Schneller, Stärker!
Die Dobot CR-Serie kollaborativer Robotikarme wurde im Laufe der Jahre verwendet, um viele industrielle Arbeitsabläufe zu automatisieren. Egal ob Palettierung, Schweissen oder Montage, in der CR-Serie (CR3, CR5, CR7, CR10, CR12, CR16) finden Sie die optimale Lösung für Ihre Anwendung.
Die Branche kann jedoch extremen Bedingungen unterliegen, in denen schwere Lasten, schneller Betrieb und Einhaltung strenger Sicherheitsvorschriften erforderlich sind.
Als Reaktion auf diese Bedürfnisse hat Dobot die neueste Generation seiner kollaborativen Roboterarme, die CRA-Serie, entwickelt, die die Vorteile von Cobots integriert und ihre Leistungsparameter auf ein neues Niveau hebt. Aber was gibt dem zeitlosen Design neuen Schwung?
Verbesserte interne Architektur und Geschwindigkeit

Dank seiner neuen Generation interner Servomotoren und innovativen dynamischen Algorithmen wurde die Winkelgeschwindigkeit der Achsen um 25% erhöht, während Vibrationen bei niedrigen Geschwindigkeiten im Vergleich zur CR-Serie um 50% reduziert wurden.
Das Bremssystem wurde komplett neu gestaltet und verwendet jetzt ein elektromagnetisches System, das den vorherigen Bremsweg von 10 mm auf weniger als 1 mm reduziert! Eine überfüllte Arbeitsumgebung ist für die industriellen Roboterarme von Dobot kein Problem mehr und Sie müssen sich keine Sorgen mehr machen, dass der Roboter Sie oder Ihren Kollegen verletzt.
Neue Steuereinheit, erweitertes Aufgabenspektrum

Ein wesentliches Zubehör für Dobots industrielle kollaborative Roboterarme ist die Steuereinheit, die verwendet wird, um den Roboterarm zu programmieren und verschiedene Zubehörteile daran anzubringen.
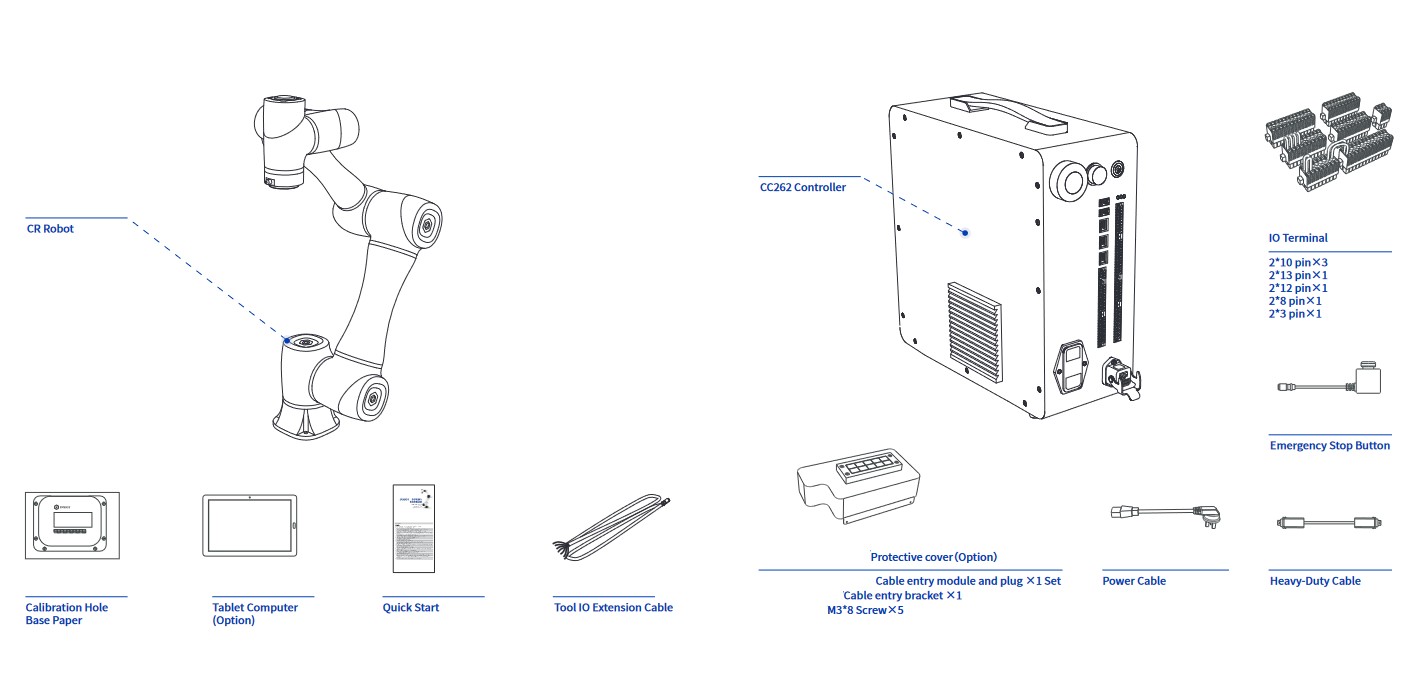
Die IO-Schnittstelle des neuen CC262-Controllers wurde auf 24 Pins aufgerüstet, und seine Kommunikationsschnittstelle wurde um je 1 zusätzlichen Netzwerk- und USB-Anschluss erweitert. Zusätzlich unterstützt der Controller RS485, sein Gewicht wurde um 20% reduziert, die Anzahl der Kommunikationsprotokolle wurde verdoppelt und sein Geräuschpegel ist um 20% niedriger!
Die Software des Controllers läuft auf Version 4.x, was Raum für die kontinuierliche Weiterentwicklung der DobotStudio Pro IDE (Integrierte Entwicklungsumgebung) lässt. Dadurch wird die Benutzeroberfläche noch übersichtlicher, benutzerfreundlicher und erleichtert das Verständnis von Aktualisierungen.
Neue Generation, neues Modell
Das allererste Modell der CRA-Serie fügt der Anwendung von Cobots innovative Technologie und neue Parameter hinzu.
Der CR20A, der größte in der Serie, ist der größte Roboterarm, der jemals von Dobot hergestellt wurde, mit einer Tragfähigkeit von ca. 20 kg und einer Reichweite von 1750 mm, was die Automatisierung ermöglicht! Das bedeutet, dass Aufgaben mit schwereren und größeren Werkstücken in industriellen Anwendungen kein Problem darstellen,
Alle Vorteile von kollaborativen Robotikarmen beibehalten!
Flexible Bereitstellung, schnelle Umsetzung
Wie auch bei der vorherigen Serie lässt sich das System in nur 20 Minuten einrichten und innerhalb von bis zu 1 Stunde einsatzbereit machen.
Leicht zugänglich, einfach zu lernen.

Dobots Software- und Arithmetik-Technologie machen den Betrieb und die Verwaltung der Roboterarm-Serie intelligent und einfach. Dank Software und manueller Schulung können Sie menschliche Bewegungen präzise nachahmen. Programmierkenntnisse sind nicht erforderlich.
Erweitertes Sicherheitssystem und mehr
Der Vorteil von kollaborativen Robotern besteht darin, dass sie mit Drucksensoren im Gehäuse ausgestattet sind, die es dem Roboter ermöglichen, seine aktuelle Arbeit zu stoppen, wenn der Druck einen Schwellenwert überschreitet, und das System wird erst fortgesetzt, wenn der Druck freigegeben ist. Durch diese Ergänzung werden Effizienz und Sicherheit der menschlichen Roboterarbeit auf ein neues Niveau gehoben.
Endgeräte
Endeffektoren sind Geräte, die an den Enden der Roboterarme montiert werden können. Die DOBOT CRA Kollaborationsroboter-Serie ist mit einer Vielzahl von Endeffektoren kompatibel, sodass sie selbst die spezifischsten Anforderungen Ihres Unternehmens erfüllen kann. Ob Schweißen, Palettieren, Beladen, Verschrauben, Sortieren, Montage oder Qualitätskontrolle – jeder Prozess kann mit Vakuum- oder elektronisch betriebenen Greifern, MODBUS-Einheiten für Kommunikation und Automatisierung oder Förderband- und Visuellen Einheit-Zubehör ausgestattet werden, um die Effizienz des Roboterarms zu maximieren.
Parameter
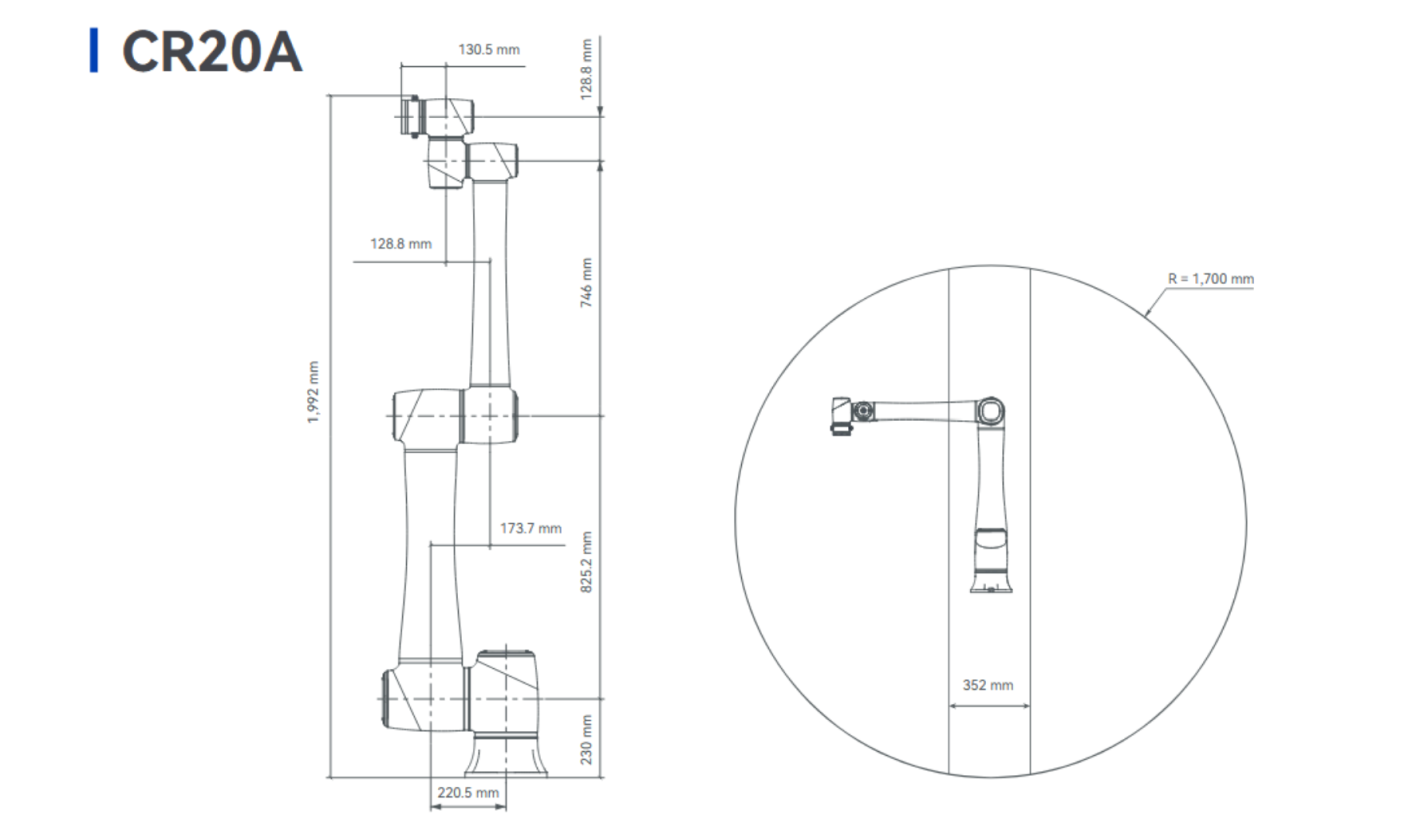
CR20A kollaborativer Roboterarm |
Gewicht | 70 kg |
Maximale Arbeitsbelastung | 20 kg |
Maximaler Arbeitsradius | 1700mm |
Maximale Geschwindigkeit des Endeffektors (TCP) | 2m/s |
Bewegungsumfang der Gelenke | J1 | ±360° |
J2 | ±360° |
J3 | ±165° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Maximale Geschwindigkeit der Gelenke | J1/J2 | 120°/s |
J3 | 150°/s |
J4/J5/J6 | 180°/s |
I/O-Schnittstelle | Stromanschluss | 24V, zertifiziert 2A, maximal 3A |
Häfen (2) | RS485/AI, |
2x Machen |
2x IN |
Wiederholte Genauigkeit | ±0,1 mm |
Schutzart | IP54 |
Lärm | ≤ 70 dB |
Arbeitstemperatur | 0~50°C |
Länge des Verbindungskabels der Controller-Einheit | 6 m |
Materialien | Aluminium, ABS-Kunststoff, Kohlefaserstahl |
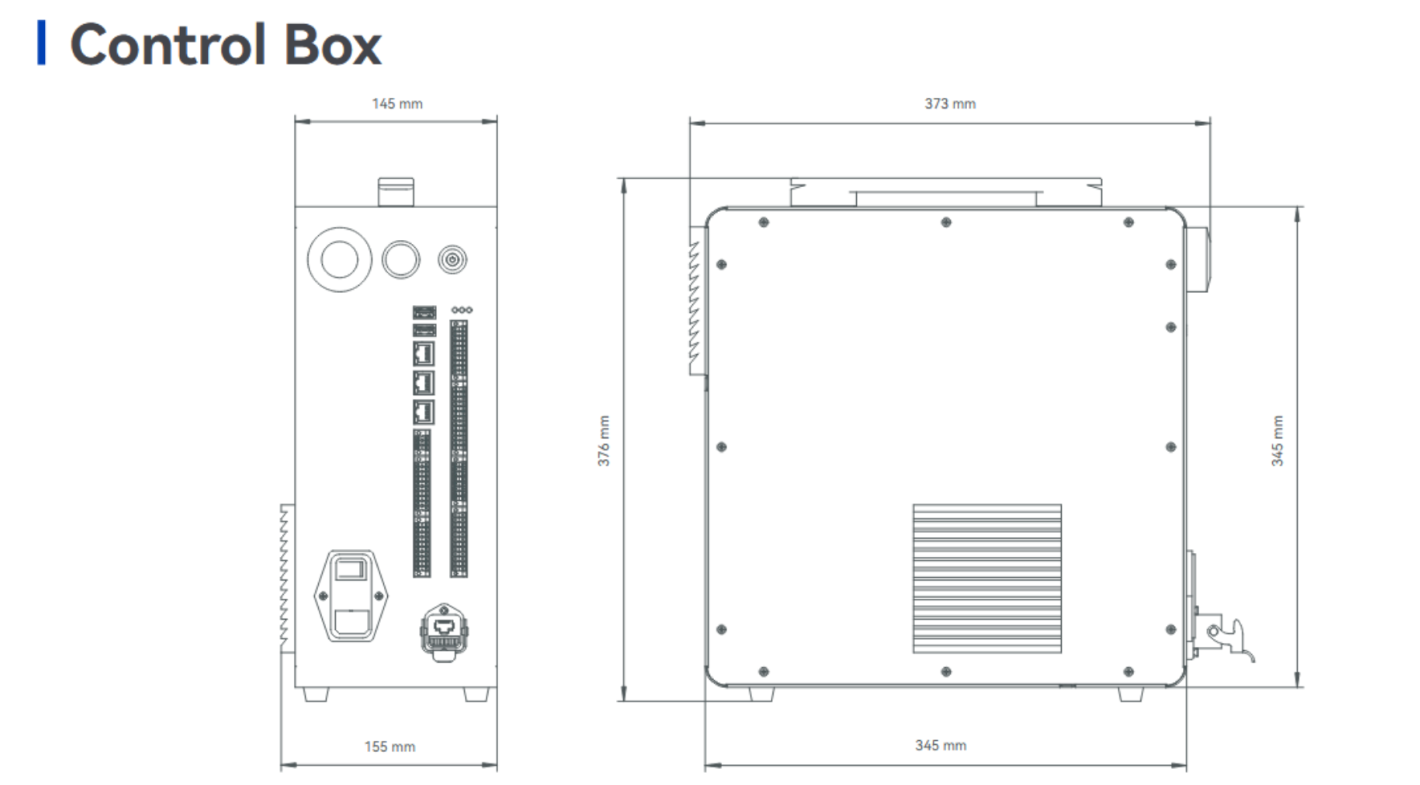
CC262 Steuereinheit |
Gewicht | 15 kg |
Größe (L x H x B) | 400mm x 400mm x 175mm |
Spannung | 100V ~ 240V AC |
IO-Spannung | 24V, Max. 3A, Max. 0,5A pro Kanal |
E/A-Anschlüsse | MI / DO | 24-Kanal (NPN und PNP) |
KI / AO2 | 2 Kanäle (Spannungs- oder Strommodus) |
Ja / Nein | 10 Kanäle (5 Serien konfigurierbar für Sicherheitsfunktion) |
Kommunikationsschnittstelle | Ethernet | 2 (TCP/IP, Modbus TCP, Profinet, Ethernet/IP) |
EtherCAT | Reserviert für die Steuerung der externen Achsen des Roboters |
USB | 2 |
RS485 | 1 (für ModbusRTU Kommunikation) |
Betriebsbedingungen | Temperatur | 0~50°C |
Luftfeuchtigkeit | 0 % - 95 % (nicht kondensierend) |
Lärm | ≤ 60 dB |
Fernbedienung | Unterstützt |
Schutzart | Original: IP20, Optional: IP54 |
Kühlfunktion | Fan |
Programmiermodi | PC, Smartphone (Android und IOS) |
Inhalt des Pakets
6 Achsen, 4 Bewegungsmodi
Der Roboterarm kann von Punkt A nach Punkt B bewegt werden, indem er zwei Koordinatenpunkte in 4 Modi verbindet:
Gemeinsame interpolierte Bewegung: Die Bewegung kann mithilfe der GO- und MoveJ-Software implementiert werden, die es dem Roboterarm ermöglicht, sich von Punkt A nach Punkt B umzupositionieren, indem sie den Gelenkwinkel des Roboterarms interpoliert, ohne die Position des Endeffektors zu berücksichtigen.
Linear interpolierte Bewegung: Die Bewegung kann durch Move implementiert werden, was es dem Roboter ermöglicht, die Koordinaten von Punkt A und Punkt B zu verbinden, wobei er die Position des Himmels betrachtet, der das Endwerkzeug entlang einer geraden Linie führt. Im Falle einer linearen Bewegung kann zwischen dem Sprungmodus unterschieden werden, bei dem das Endwerkzeug entweder die beiden Koordinatenpunkte zu ihren Endpositionen bewegt oder eine Abrundung anwendet, um eine kontinuierliche Bewegung auszuführen, wobei die Koordinaten des Punktes berücksichtigt werden.
ARC - Kreisinterpolierte Bewegung: Der Roboter verbindet die Punkte A und B entlang eines Bogens unter Verwendung eines Hilfspunktes C, wodurch eine Kreisbewegung ausgeführt wird, die die Position des Endeffektors berücksichtigt
Kreis - Kreisförmige Interpolierte Bewegung: Der Roboter verbindet die Punkte A und B mittels eines Hilfspunkts C und führt seine Bewegung aus, indem er eine kreisförmige Form beschreibt und die Position des Endeffektors berücksichtigt.
Programmieren kann auf verschiedene Arten durchgeführt werden. Beispiele sind:
Reproduktion der Endwerkzeugbewegung: Eine verwandte Programmiermethode ist die Teach & Playback-Programmierung, eine Möglichkeit, Roboterarme zu programmieren, die keine Programmierkenntnisse erfordert, um die Parameter einer Aufgabe festzulegen. Der Programmierer kann den Roboterarm frei bewegen, indem er eine Sicherheitsverriegelungstaste drückt und gedrückt hält und dann die Taste loslässt, um den Arm in der gewünschten Position zu stabilisieren. In der Programmierschnittstelle können diese Koordinaten als Koordinatenpunkt angezeigt und gespeichert werden, den der Roboterarm während der Ausführung einer Aufgabe berühren muss. Durch Speichern der Punkte können Sie dann den Roboterarm ohne Programmierkenntnisse bewegen.
Blockbasiertes Programmieren (Drag and Drop): auch als grafisches Programmieren bekannt, erleichtert das Erlernen von Programmierung durch die Visualisierung von Funktionen, Variablen und Betriebsmodi. Das Arbeitsprinzip beruht auf der Verknüpfung von Blöcken, d.h. die Blöcke, die jede Funktion repräsentieren, können nacheinander programmiert werden, um den Roboterarm zu programmieren.
Python Skript: Aufgrund seiner leicht verständlichen Syntax und seiner umfangreichen Bibliothek wird Python nicht nur für Automatisierung, sondern auch für den Aufbau künstlicher Intelligenz eingesetzt. Daher hat auch die Robotik Python gewählt, um die Fähigkeiten von Robotern zu maximieren.
DobotStudio, die Entwicklungsumgebung für den Roboterarm, wird standardmäßig mit den benötigten Bibliotheken geliefert, um den Roboterarm zu steuern. Alles was Sie tun müssen, ist die Dokumentation zu überprüfen und Ihr eigenes Python-Programm zu erstellen, um Ihren Roboterarm auszuführen.

Koordinatensysteme
Das Koordinatensystem des Robotikarmsystems ist in vier Koordinatensysteme unterteilt:
Basis-Koordinatensystem: Das Basis-Koordinatensystem definiert die Koordinaten, Position und Bewegung des Endeffektors basierend auf dem Basis-Koordinatensystem, das vom kartesischen Koordinatensystem definiert wird.
Gemeinsames Koordinatensystem: Das gemeinsame Koordinatensystem wird durch die möglichen Bewegungen jedes Gelenks definiert
End-Tool-Koordinatensystem: Koordinatensystem, das den Offset-Abstand und den Rotationswinkel definiert, dessen Ursprung und Ausrichtungen je nach Position des Werkstücks auf dem Roboter-Tisch variieren
Benutzerkoordinatensystem: Ein verschiebbares Koordinatensystem, das verwendet wird, um Geräte wie Vorrichtungen und Werkbänke darzustellen. Die Ausrichtung des Ursprungs und der Achsen kann je nach Standortanforderungen bestimmt werden, um Punktdaten im Arbeitsbereich zu messen und Aufgaben bequem anzuordnen.