Erlernen Sie die Tricks der Automatisierung
Mit dem Zubehör für Dobot Magician EDU und BASIC
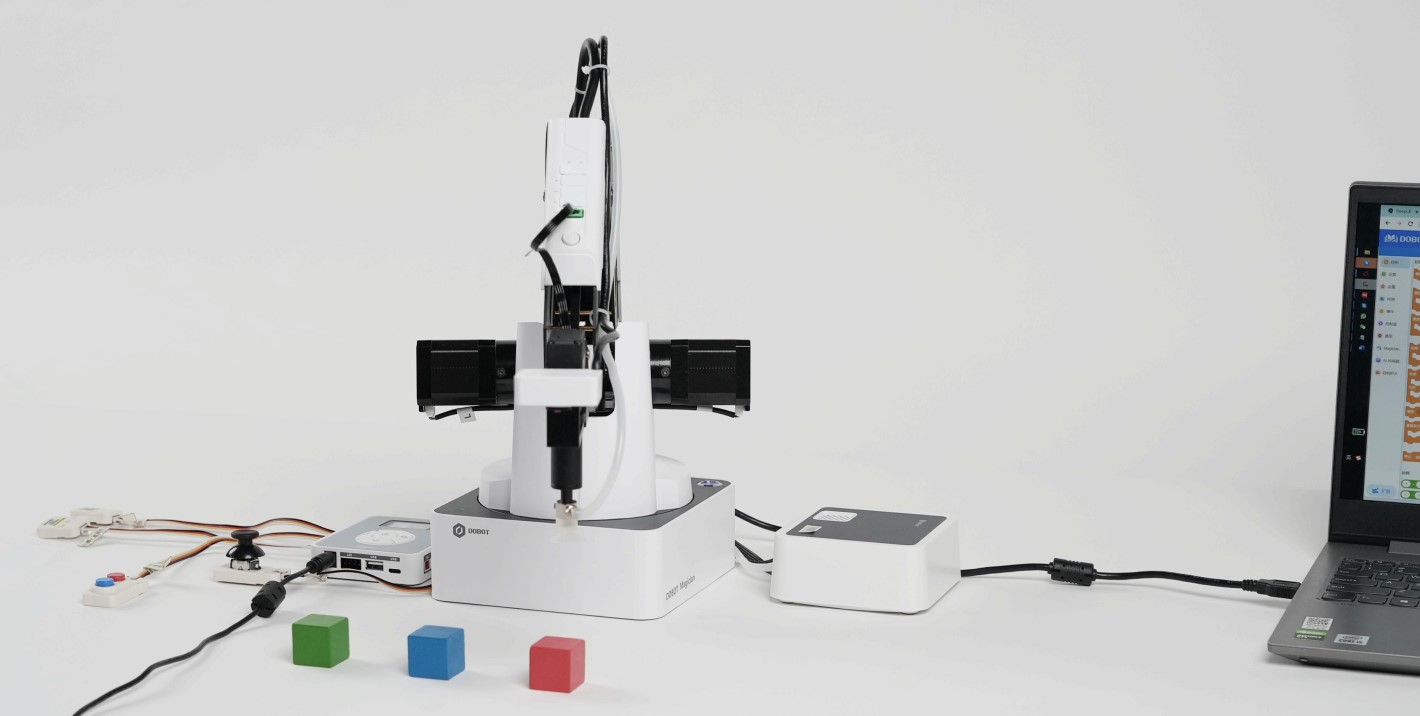
Mitglieder der Desktop-Roboterarm-Familie umfassen ein reichhaltiges Software-Ökosystem, einschließlich der Programmiersprache Python und der grafischen Programmierung. Ihre Anwendungen können mit dem Sensor Kit noch weiter erweitert werden, dessen Herzstück von Dobots eigener Steuereinheit, dem Magic Box Controller, gesteuert wird. Mit diesem Kit können Sie an Eingaben, Joystick-Steuerung und sogar KI-unterstütztes Positionieren arbeiten.
Ingenieurpraxis
Die Sensoren sind in der Lage, eine Vielzahl von Eingangssignalen zu empfangen, wodurch der EDU- oder Basic-Roboterarm von Magician geeignet ist, nahezu jeden Automatisierungsbetrieb in der Industrie zu simulieren.
Indem Sie die genauen Grenzen der Sensoren verstehen, können Sie die theoretische Grundlage für den Zusammenbau von industriellen Automatisierungsprozessen nachvollziehen und anwenden.
Kabel, Magic Box und Sensor Ports sind farbcodiert, damit du das wichtigste Element des Ingenieurwesens lernen kannst, wenn du das Paket verwendest - das ingenieurtechnische Design. Konsistenz ist ein grundlegendes Maß für jedes gute ingenieurtechnische Projekt. Mit der Farbcodierung kannst du es zu einer routinemäßigen Aufgabe machen, ein leicht verständliches System mit Hilfe der Farbcodierung aufzubauen.
Logisches Denken
Mit der Magic Box kann das System Block-basiert und unter Verwendung der Programmiersprache Python eingesetzt werden. Die Dokumentation von DobotLab wird Ihnen helfen, von den Grundlagen zu lernen, wie die Geräte funktionieren, und ihre Programmiermöglichkeiten zu erkunden.
Blockly ist eine blockbasierte Programmierung, die dazu dient, die Aufgabenfähigkeiten des Roboterarms zu visualisieren und gleichzeitig die Entwicklung von Programmieranfängern auf benutzerfreundliche Weise zu unterstützen.
Die Programmiersprache Python ist eine der beliebtesten Optionen unter Programmierern. Sie wird weitgehend zur Umsetzung von künstlicher Intelligenz, Datenverarbeitung und Automatisierung verwendet. Für ein noch detaillierteres Programmiererlebnis hat Dobot seine eigene Python-Bibliothek erstellt, mit der der Roboterarm und alle Sensoren im Paket programmierbar werden. Die große Herausforderung bringt eine große Belohnung mit sich, denn durch die Verwendung von Dobot lernen Sie nicht nur, wie man den Roboterarm programmiert, sondern auch, wie man die Syntax der Programmiersprache Python anwendet, was es Ihnen ermöglicht, den ersten Schritt zur Erstellung Ihrer eigenen künstlichen Intelligenz zu gehen.


Parameter
Joystick
| Kommunikationsmodus | I2C |
| Verkabelung | Universelles Sensor-Kabel |
| X/Y-Ausgabewert | 10 - 250 |
| Z-Ausgabewert | 0 (gelöst); 1 (gedrückt) |
| Spannung | 5V |
| Stromstärke | 50mA |
Zweifach-Schalter
| Kommunikationsmodus | IO |
| Verkabelungskabel | Universelles Sensorkabel |
| Spannung | 5V |
| Knopfausgabewert | 0 (freigegeben); 1 (gedrückt) |
| Stromstärke | 50mA |
PIR-Sensor
| Kommunikation | IO |
| Verkabelungskabel | Universal-Sensor-Kabel |
| Erfassungsabstand | 150 cm |
| Verzögerungszeit | 2 s |
| Induktionsbereich | <100° |
| Statischer Strom | <60uA |
| Betriebstemperatur | -20 ~ 80°C |
| Spannung | 5V |
| Strom | 50mA |
Gestensensor
| Kommunikationsmodus | I2C |
| Verkabelung | Universal Sensor Kabel |
| Unterstützte Gesten | Oben, Unten, Rechts, Links, Vorwärts, Rückwärts, Im Uhrzeigersinn, Gegen den Uhrzeigersinn |
| Effektive Erkennungsdistanz | 5 - 15cm |
| Spannung | 5V |
| Stromstärke | 50mA |
Fotoelektrischer Sensor
| Kommunikationsmodus | IO |
| Verkabelungskabel | Universelles Sensorkabel |
| Wertebereich | 0 (ohne Schirm); 1 (mit Schirm) |
| Standard-Erkennungsumgebung | Sonnenlicht weniger als 10.000 LX, Glühlampe weniger als 3.000 LX |
| Objekt, das erkannt werden soll | transparentes oder undurchsichtiges Objekt |
| Betriebstemperatur | -25 ~ 55°C |
| Reaktionszeit | <2ms |
Schallsensor
| Kommunikationsmodus | ADC |
| Verkabelung | Universelles Sensorkabel |
| Wertebereich | 0 ~ 1023 |
| Sensitivität | (48dB ~ 52dB) @ 1kHz |
| Mikrofonimpedanz | 2,2k Ohm |
| Mikrofonfrequenz | 16 ~ 20 kHz |
| SNR S/N | 54dB |
Humiture-Sensor
| Kommunikationsmodus | I2C |
| Verkabelung | Universeller Sensor-Kabel |
| Temperaturbereich | 0 ~ 60°C/±1°C |
| Luftfeuchtigkeitsbereich | 10 ~ 90% RH ±5%RH |
| Spannung | 5V |
| Strom | 50mA |
Farbsensor
| Kommunikationsmodus | I2C |
| Kabelverbindung | Universelles Sensor-Kabel |
| Farberkennungsresultat | 0 (keine Farbe); 1 (rot); 2 (grün); 3 (blau); 4 (gelb); 5 (schwarz); 6 (weiß) |
| RGB-Farbwert | 0-200 (ein größerer Wert deutet auf eine dunklere Farbe hin) |
| Spannung | 5V |
| Stromstärke | 50mA |
LED-Modul
| Kommunikationsmodus | Monobus |
| Verkabelungskabel | Universelles Sensor Kabel |
| RGB Bereich | 0 ~ 100% |
| Spannung | 5V |
Lichtsensor
| Kommunikationsmodus | I2C |
| Verkabelung | Universelles Sensor-Kabel |
| Farberkennungsergebnis | 0 (keine Farbe); 1 (rot); 2 (grün); 3 (blau); 4 (gelb); 5 (schwarz); 6 (weiß) |
| RGB-Farbwert | 0-200 (ein höherer Wert zeigt eine dunklere Farbe an) |
| Spannung | 5V |
| Stromstärke | 50mA |
Knopf-Potentiometer
| Ausgangsspannung | 0 ~ 2500mV |
| Kommunikationsmodus | ADC |
| Verbindungskabel | Universalkabel für Sensoren |
| Helligkeitsrückgabewert | 0 ~ 407 (extreme Schwankungen sind normal) |
| Spannung | 5V |
| Strom | 50mA |
Mikro-Servo
| Kommunikationsmodus | PWM |
| Verkabelung | Universalkabel für Sensoren |
| Servogeschwindigkeit | 0,1 mp/60°/4,8V; 0,09 mp/60°/6,0V |
| Drehmoment | 1,6 kg*cm/4,8V; 1,8 kg*cm/6,0V |
| PWM-Frequenz | 50Hz/0,5~2,5MS |
| Spannung | 4,8V - 6,0V |
| Stromverbrauch im Leerlauf | 60mA |
AI Kamera
| Größe | 50mm x 44mm x 25mm |
| CMOS | 1/4 Zoll |
| Bildpixel | 1M |
| Bildformat | YUV/MJPG |
| Datenformat | 240*320 // 640*480 // 1280*720 |
| Maximale Bildverarbeitungsrate | 1280*720@30fps |
| Kameraeinstellungen | Sättigung, Kontrast, Schärfe |
| Weißabgleich | Auto |
| Belichtung | Auto |
| Betriebstemperatur | 0 ~ 50°C |
| Spannung | 5V |
| Schnittstelle | USB2.0 |
| Toneingang | Integriertes Mikrofon |
| Kamerabetriebswinkel | 0 ~ 135° |
| Fähigkeiten | Gesichtserkennung, Bilderkennung, OCR Texterkennung, Spracherkennung, etc. |
Magic Box
| MCU | ARM 32-bit Cortex-M4 |
| Kommunikation | USB virtueller serieller Port/serieller Port/Bluetooth |
| Hauptfrequenz | 168 MHz |
| Programmiersprache | MicroPython |
| Spannung | 100V - 240V AC, 50/60Hz |
| Software | DobotStudio/DobotLab |
| Eingangsspannung | 12V == 5A DC |
| Gewicht | 98g |
| Betriebstemperatur | -5°C ~ 45°C |
| Größe | 95mm x 80mm x 21.5mm |
| Leistung | Maximal 60W |
Paketinhalt

- 1 Stk Joystick
- 1 Stk Dual-Taste
- 1 Stk PIR-Sensor
- 1 Stk Gestensensor
- 1 Stk Fotoelektrischer Sensor
- 1 Stk Tonsensor
- 1 Stk Feuchtigkeitssensor
- 1 Stk Farbsensor
- 1 Stk LED-Modul
- 1 Stk Lichtsensor
- 1 Stk Drehknopf-Potentiometer
- 1 Stk Mikroservo
- 1 Stk KI-Kamera
- 1 Stk Zauberbox