DOBOT COBOT CR16
Kollaborativer industrieller Roboterarm

Der Dobot CR16 gehört zur größeren Größenklasse von Industrierobotern, mit seiner kompakten Größe und einer Traglast von 16kg, die eine breite Palette von Produktionsautomatisierung mit dem Robotikarm ermöglicht. Er ist mit einer Vielzahl von Endwerkzeugen und Anwendungen erhältlich, was ihn zu einem äußerst nützlichen Werkzeug für alle Industriebereiche macht. Er ist auch ein hervorragendes Werkzeug für die berufliche Ausbildung, die höhere Bildung, Lagerhaltung, Produktions-Simulation und viele andere Anwendungen.
Flexible Einsatzmöglichkeiten, schnelle Implementierung
Verbessern Sie die Flexibilität des Arbeitsablaufs und die Effizienz der Produktion mit einem einfach zu implementierenden CR Collaborationsroboter, der in nur 20 Minuten eingerichtet werden kann und innerhalb von maximal 1 Stunde einsatzbereit ist.
Leicht zugänglich, leicht zu erlernen

Die Software- und Arithmetiktechnologie von Dobot macht die CR-Serie von kollaborativen Robotern intelligent und einfach zu bedienen und zu verwalten. Dank Software und manueller Schulung kann sie menschliche Bewegungen präzise nachahmen. Programmierkenntnisse sind nicht erforderlich.
Fortgeschrittenes Sicherheitssystem und mehr
Der Vorteil von kollaborativen Robotern besteht darin, dass sie mit Drucksensoren in ihren Gehäusen ausgestattet sind. Wenn der Druck einen bestimmten Schwellenwert überschreitet, stoppt der Roboter seine derzeitige Arbeit und das System wird erst fortgesetzt, wenn der Druck gelöst wird. Mit dieser Ergänzung werden die Effizienz und Sicherheit der Mensch-Roboter-Arbeit auf ein neues Niveau gehoben.
Erweiterbar, kompatibel
Die CR-Kollaborationsroboterserie wird auch für ihre universellen Kommunikationsschnittstellen empfohlen, zusätzlich zu ihrer großen Auswahl an Endwerkzeugen. Mit mehreren I/O- und Kommunikationsschnittstellen sind die CR-Cobots vielseitig erweiterbar und kompatibel mit einer Vielzahl von Endeffektoren. Als Ergebnis können CR-Cobots eine Vielzahl von Anforderungen erfüllen und in verschiedenen Anwendungssituationen eingesetzt werden.
Parameter
Produktname | DOBOT CR16 |
Gewicht | 20 kg |
Maximale Nutzlast | 16 kg |
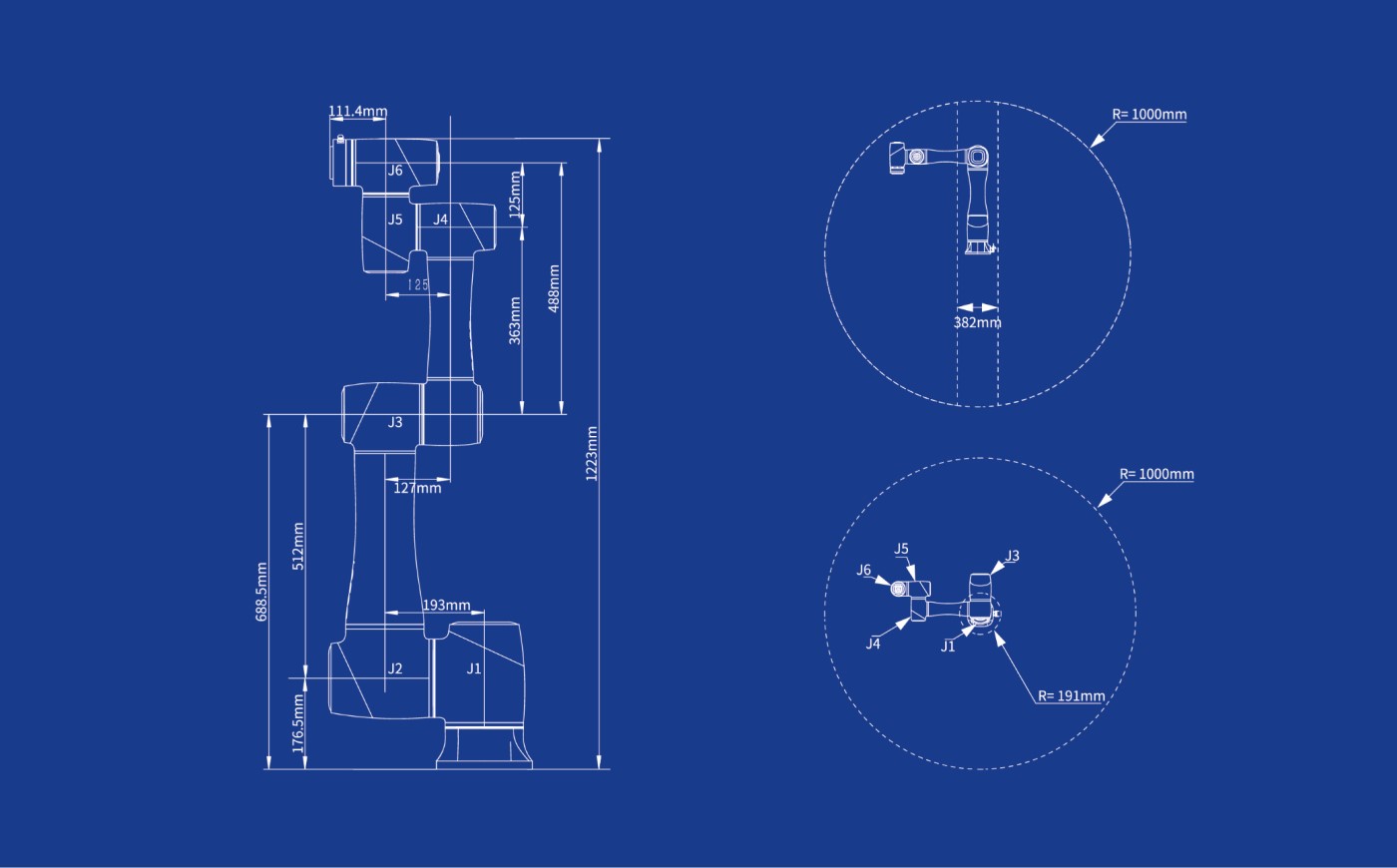
Maximale Reichweite | 1223mm |
Nennspannung | DC48V |
Maximale Endwerkzeuggeschwindigkeit | 3m/s |
Platz für die Bewegung der Gelenke | J1 | ±360° |
J2 | ±360° |
J3 | ±160° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Maximale Gelenkgeschwindigkeit | J1/J2 | 120°/s |
| J3/ J4/J5/J6 | 180°/s |
I/O-Schnittstelle für Terminalgeräte | Mi/Do/Fr | 2 |
Ao | 0 |
Kommunikationsschnittstelle | Kommunikation | RS485 |
Steuer I/O | Di | 16 |
MO/MI | 16 |
KI/AO | 2 |
ABZ Inkrementalgeber | 1 |
Wiederholgenauigkeit | ±0.03 mm |
Kommunikation | TCP/IP, Modbus, EtherCAT, WIFI | TCP/IP, Modbus, EtherCAT, WIFI | TCP/IP, Modbus, EtherCAT, WIFI | TCP/IP, Modbus, EtherCAT, WIFI |
IP-Standard | IP54 |
Betriebstemperatur | 0~45° |
Leistung | 350W |
Materialien | Aluminiumlegierung, ABS-Kunststoff |
End-Werkzeuge

Die Endwerkzeuge sind Geräte, die an den Enden der Roboterarme montiert werden können. Die DOBOT CR-Kollaborationsroboterserie ist mit einer Vielzahl von Endwerkzeugen kompatibel, damit sie selbst den spezifischsten Anforderungen Ihres Unternehmens gerecht werden kann.
- Verpacken und Palettieren
- Handhabung
- Polieren
- Schrauben
- Kleben, Batching und Schweißen
- Montage
- Bearbeitung
- CNC
- Qualitätskontrolle
- Spritzgießen
Inhalt des Pakets
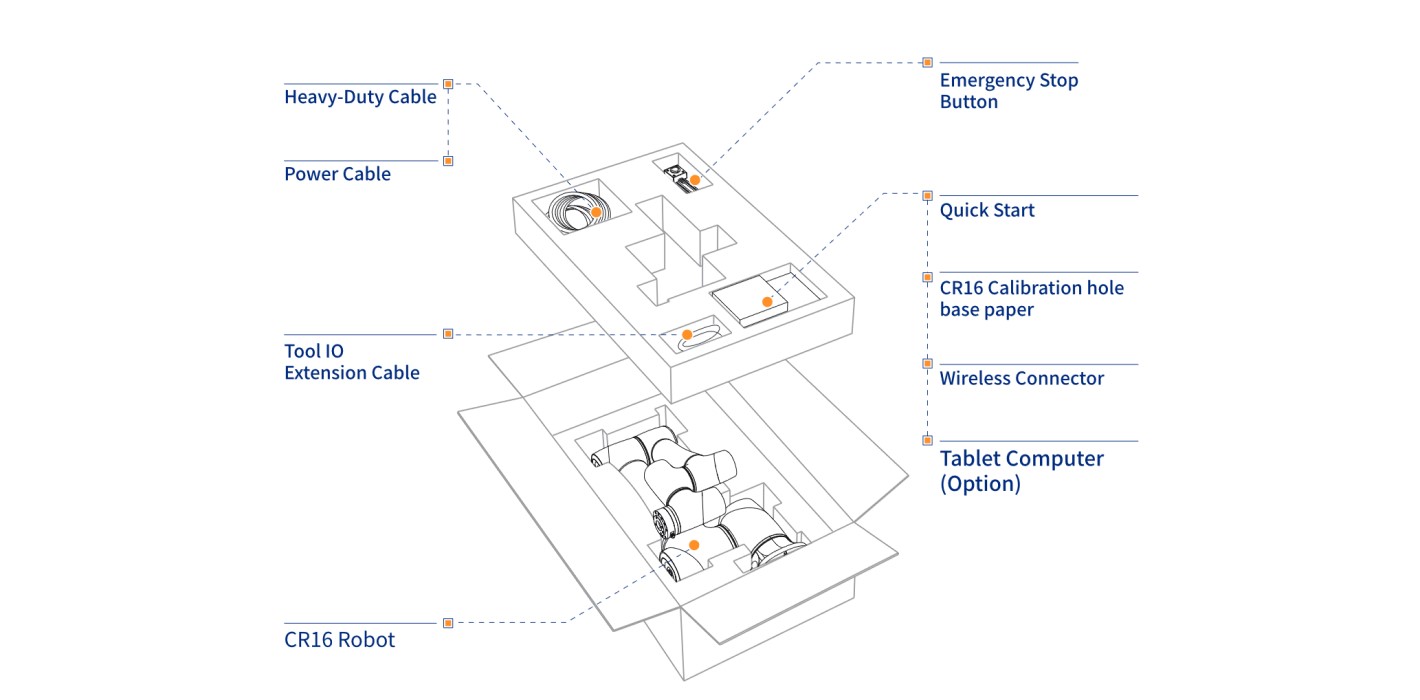
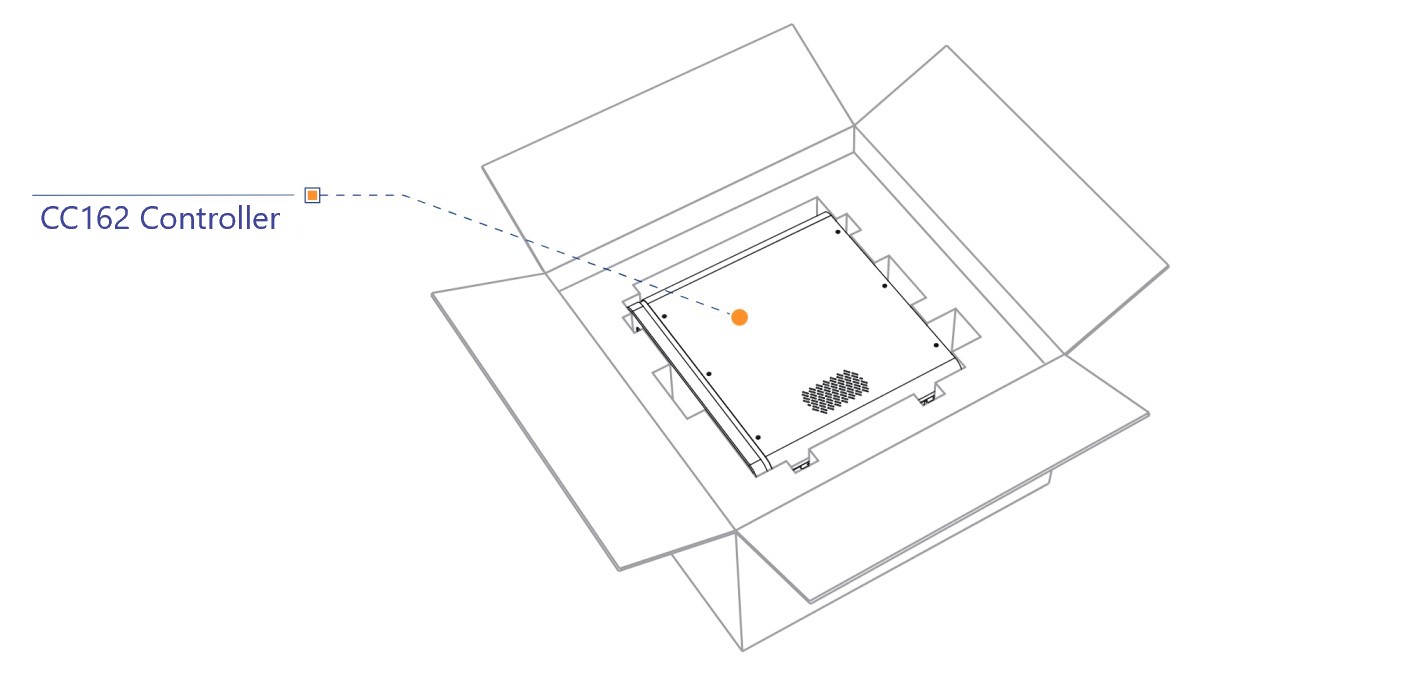
Der Roboterarm besteht aus zwei Einheiten. Ein Roboterarm und eine Steuereinheit zur Programmierung. Die Steuereinheit ist ein Computer, der mit dem Roboterarm kommuniziert, um ihn zu steuern. Die Steuereinheit verfügt über die IO-Ports, an die verschiedene Zubehörteile angeschlossen werden können, einschließlich des Not-Aus-Schalters. Zur Kommunikation mit Ihrem Computer oder Ihrem Smart-Gerät verfügt das Steuergerät über einen USB-Anschluss zum Anschließen des WIFI-Moduls und einen Ethernet-Anschluss, wenn Sie Ihren Roboterarm über eine Kabelverbindung steuern und programmieren möchten.
* Das Drücken des Not-Aus-Schalters stoppt den Roboter sofort. Zusätzlich zu den beiden Einheiten enthält das Paket die Stromkabel für die Einheiten und das IO-Kabel für die Verbindung.
6 Achsen, 4 Bewegungsmodi
Der Roboterarm kann sich von Punkt A zu Punkt B bewegen, indem er zwei Koordinatenpunkte in 4 Modi verbindet:
Gemeinsame interpolierte Bewegung: Die Bewegung kann mithilfe von GO und MoveJ implementiert werden, was es dem Roboterarm ermöglicht, sich von Punkt A nach Punkt B neu zu positionieren, indem die Gelenkwinkel des Roboterarms interpoliert werden, ohne die Position des Endeffektors zu berücksichtigen.
Linear interpolierte Bewegung: Die Bewegung wird durch das Verschieben erreicht, was es dem Roboter ermöglicht, die Koordinaten von Punkt A und Punkt B zu verbinden, den Himmel zu betrachten, der das Endwerkzeug in einer geraden Linie führt. Im Falle einer linearen Bewegung kann zwischen dem Spring-Modus unterschieden werden, bei dem das Endwerkzeug entweder die beiden Koordinatenpunkte an ihre Endpositionen bewegt oder eine Rundung anwendet, um eine kontinuierliche Bewegung auszuführen und dabei die Koordinaten des Punktes zu berücksichtigen.
ARC - Kreisförmige interpolierte Bewegung: Der Roboter verbindet die Punkte A und B entlang eines Bogens durch einen Hilfspunkt C und führt somit eine Kreisbewegung unter Berücksichtigung der Position des Endeffektors aus.
Kreis - Kreisförmige interpolierte Bewegung: Der Roboter verbindet die Punkte A und B mittels eines Hilfspunktes C und führt eine Bewegung in kreisförmiger Form aus, unter Berücksichtigung der Position des Endwerkzeugs.
Programmieren kann auf verschiedene Arten durchgeführt werden. Beispiele sind:
Reproduktion der Endwerkzeugbewegung: Eine verwandte Programmiermethode ist die Teach & Playback-Programmierung, eine Möglichkeit, Roboterarme zu programmieren, die keine Programmierkenntnisse erfordert, um die Parameter einer Aufgabe festzulegen. Der Programmierer kann den Roboterarm frei bewegen, indem er eine Sicherheitsverriegelungstaste drückt und gedrückt hält und dann die Taste loslässt, um den Arm in der gewünschten Position zu stabilisieren. In der Programmierschnittstelle können diese Koordinaten als Koordinatenpunkt angezeigt und gespeichert werden, den der Roboterarm während der Ausführung einer Aufgabe berühren muss. Durch Speichern der Punkte können Sie dann den Roboterarm ohne Programmierkenntnisse bewegen.
Blockbasiertes Programmieren (Drag and Drop): Auch bekannt als grafisches Programmieren, erleichtert das Erlernen der Programmierung durch die Visualisierung von Funktionen, Variablen und Betriebsmodi. Das Betriebsprinzip basiert auf der Verknüpfung von Blöcken, d.h. die Blöcke, die jede Funktion darstellen, können in Sequenz programmiert werden, um den Roboterarm zu steuern.
Python-Script: Aufgrund seiner leicht verständlichen Syntax und seiner umfangreichen Bibliothek wird es nicht nur für Automatisierung, sondern auch für den Aufbau von künstlicher Intelligenz verwendet. So hat auch die Robotik Python gewählt, um die Fähigkeiten von Robotern maximal auszuschöpfen.
DobotStudio, die Entwicklungsumgebung für den Roboterarm, wird standardmäßig mit den Bibliotheken geliefert, die zur Steuerung des Roboterarms benötigt werden. Alles, was Sie tun müssen, ist, die Dokumentation durchzusehen und Ihr eigenes Python-Programm zu erstellen, um Ihren Roboterarm zu betreiben.

Koordinatensysteme
Das Koordinatensystem des Roboterarmsystems ist in vier Koordinatensysteme unterteilt:
Basis-Koordinatensystem: Das Basis-Koordinatensystem definiert die Koordinaten, Position und Bewegung des Endwerkzeugs basierend auf dem Basis-Koordinatensystem, das durch das kartesische Koordinatensystem definiert ist.
Gemeinsames Koordinatensystem: Das gemeinsame Koordinatensystem wird durch die möglichen Bewegungen jedes Gelenks definiert.
Endwerkzeug-Koordinatensystem: Koordinatensystem, das den Versatzabstand und den Drehwinkel definiert, dessen Ursprung und Ausrichtungen je nach Position des Werkstücks auf dem Roboter-Tisch variieren
Benutzerkoordinatensystem: Ein bewegliches Koordinatensystem, das zur Darstellung von Ausrüstung wie Vorrichtungen und Werkbänken verwendet wird. Die Ausrichtung des Ursprungs und der Achsen kann je nach Standortanforderungen bestimmt werden, um Punktangaben im Arbeitsbereich zu messen und Aufgaben bequem anzuordnen.
Singularitätspunkte
Wenn der Roboter im kartesischen Koordinatensystem bewegt wird, kann die resultierende Geschwindigkeit der beiden Achsen nicht in einer der beiden Richtungen sein, wenn die Richtungen in einer Linie liegen, was dazu führt, dass die Freiheitsgrade des Roboters eingeschränkt werden. Der Roboter hat drei Singularitätspunkte.
Sichere Investition, herausragende Zuverlässigkeit
Die robuste und stabile Bauqualität der CR-Serie von kollaborativen Robotern verspricht eine Lebensdauer von bis zu 32.000 Stunden bei niedrigen Betriebskosten. Dadurch wird die CR-Serie nicht nur zu einer sicheren Investition, sondern auch zu einer Rendite.
