Erleben Sie die Tricks der Automatisierung
Mit Hilfe des Zubehörs von Dobot Magician LITE
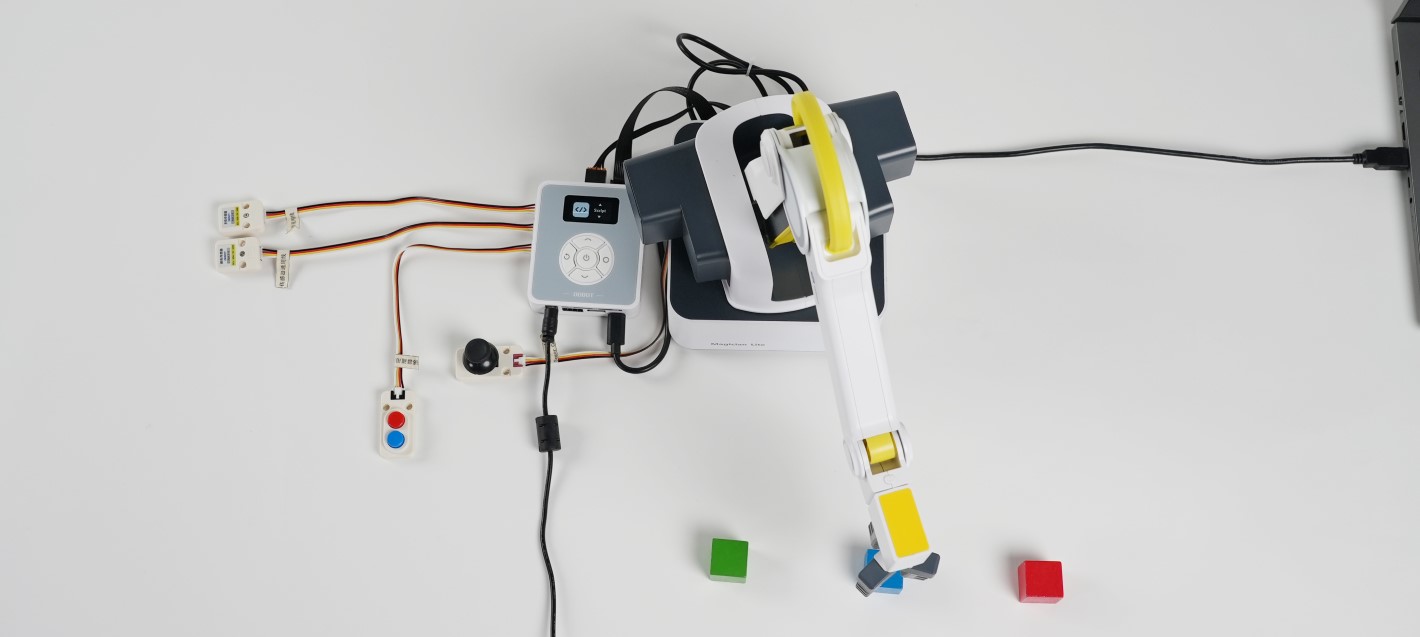
Mitglieder der Desktop-Roboterarm-Familie bieten ein umfangreiches Software-Ökosystem, einschließlich der Programmiersprache Python und grafischer Programmierung. Ihre Anwendungen können mit dem Sensor Kit noch weiter erweitert werden. Mit dem Kit können Sie Eingabeaktionen, Joysticksteuerung und sogar KI-unterstütztes Positionieren erleben.
Ingenieurpraxis
Die Sensoren sind in der Lage, eine Vielzahl von Eingangssignalen zu empfangen, was den Roboterarm von Magician LITE für die Simulation fast jeder Automatisierungsoperation in der Industrie geeignet macht. Indem Sie die genauen Grenzen der Sensoren verstehen, können Sie die theoretische Grundlage für die Zusammenstellung industrieller Automatisierungsprozesse verstehen und anwenden.
Die Kabel, die Magic Box und die Sensoranschlüsse sind farbcodiert, so dass du das wichtigste Element der technischen Vorgänge beim Einsatz dieses Kits lernen kannst: technisches Design. Transparenz ist das grundlegende Maß für jede gute Ingenieurarbeit. Mit der Farbcodierung kannst du es zur Routine machen, ein leicht verständliches System mithilfe der Farbcodierung aufzubauen.
Logisches Denken
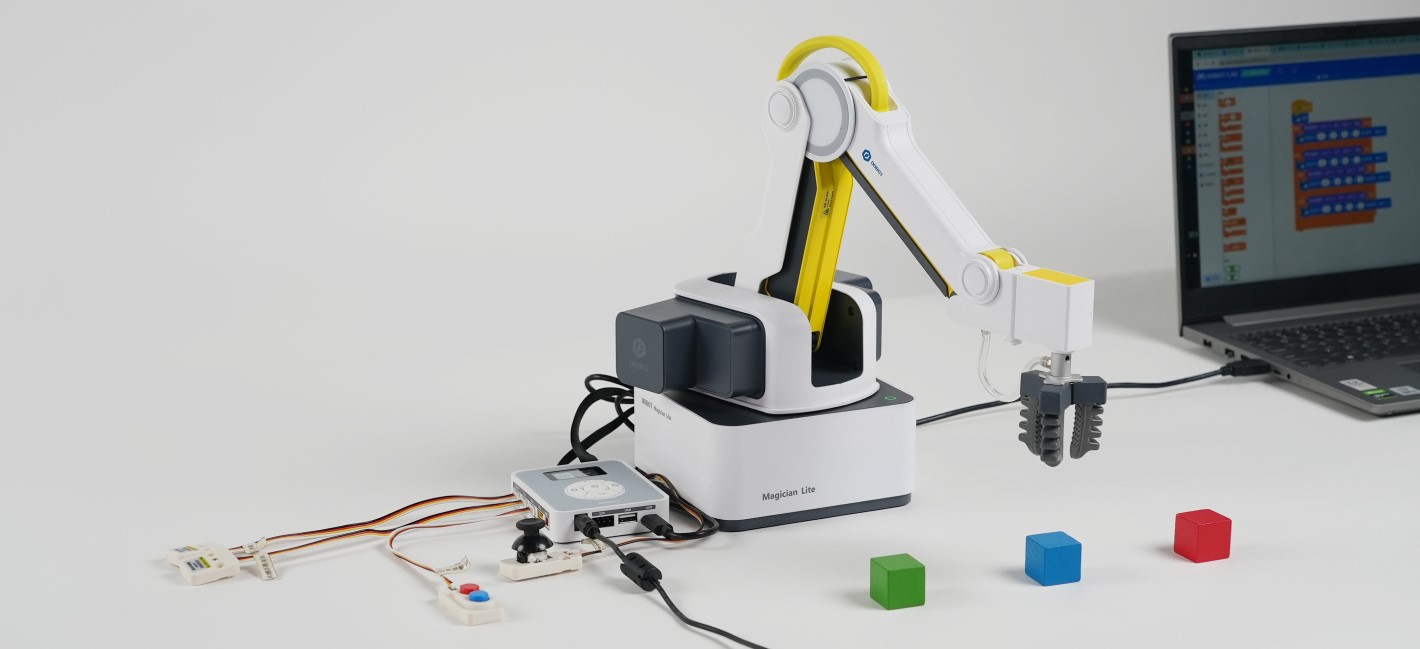
Mit der Magic Box kann das System blockweise und unter Verwendung der Programmiersprache Píthon eingesetzt werden. Die Dokumentation von DobotLab wird Ihnen helfen, von den Grundlagen aus zu lernen, wie die Geräte funktionieren und ihre Programmiermöglichkeiten zu erkunden.
Block-basiertes Programmieren (Blockly) hilft dabei, die Fähigkeiten zur Ausführung von Aufgaben des Roboterarms zu visualisieren und gleichzeitig die Entwicklung von Programmieranfängen auf benutzerfreundliche Weise zu unterstützen.
Die Programmiersprache Python ist eine der beliebtesten Optionen unter Programmierern. Sie wird häufig zur Umsetzung von künstlicher Intelligenz, Datenverarbeitung und Automatisierungsprozessen eingesetzt. Für ein noch detaillierteres Programmiererlebnis hat Dobot seine eigene Python-Bibliothek entwickelt, mit der der Roboterarm und alle Sensoren im Paket programmierbar werden. Die große Herausforderung geht mit einer großen Belohnung einher, denn durch die Verwendung wird man nicht nur lernen, wie man den Roboterarm programmiert, sondern auch die Syntax der Python-Programmiersprache anwenden und somit den ersten Schritt zur Entwicklung der eigenen künstlichen Intelligenz machen.

Parameter
Joystick
| Kommunikationsmodus | I2C |
| Kabel | Universal Sensor Cable |
| X/Y-Ausgabe (Bewegung des Sticks links/rechts - hoch/runter) Werte | 10 - 250 |
| Z-Ausgabe (Stick-Druck) | 0 (nicht gedrückt); 1 (gedrückt) |
| Spannung | 5V |
| Stromstärke | 50mA |
Duales Tastenfeld
| Kommunikationsmodus | IO |
| Kabel | Universelles Sensorkabel |
| Spannung | 5V |
| Ausgabewert der Tasten | 0 (losgelassen); 1 (gedrückt) |
| Stromstärke | 50mA |
PIR-Sensor
| Kommunikationsmodus | IO |
| Kabel | Universelles Sensorkabel |
| Erfassungsabstand | 150cm |
| Verzögerungszeit | 2s |
| Induktionsabstand | <100° |
| Statischer Strom | <60uA |
| Betriebstemperatur | -20 ~ 80°C |
| Spannung | 5V |
| Strom | 50mA |
Gestensensor
| Kommunikationsmodus | I2C |
| Kabel | Universelles Sensor-Kabel |
| Unterstützte Gesten | Nach oben, nach unten, nach rechts, nach links, nach vorne, nach hinten, im Uhrzeigersinn, gegen den Uhrzeigersinn |
| Effektive Erkennungsentfernung | 5 - 15cm |
| Spannung | 5V |
| Strom | 50mA |
Fotoelektrischer Sensor
| Kommunikationsmodus | IO |
| Kabel | Universalkabel für Sensor |
| Wertebereich | 0 (kein Schutz); 1 (mit Schutz) |
| Allgemeine Erkennungsumgebung | Sonnenlicht unter 10000LX, Glühbirne unter 3000LX |
| Zu erkennendes Objekt | Transparent oder undurchsichtig |
| Betriebstemperatur | -25 ~ 55°C |
| Reaktionszeit | <2ms |
Schallsensor
| Kommunikationsmodus | ADC |
| Kabel | Universeller Sensor-Kabel |
| Wertebereich | 0 ~ 1023 |
| Empfindlichkeit | (48dB ~ 52dB) @ 1kHz |
| Mikrofon-Impedanz | 2,2k Ohm |
| Mikrofon-Frequenz | 16 ~ 20 kHz |
| SNR S/N | 54dB |
Feuchte-/Temperatursensor
| Kommunikationsmodus | I2C |
| Kabel | Universelles Sensor-Kabel |
| Temperaturbereich | 0 ~ 60°C/±1°C |
| Feuchtigkeitsbereich | 10 ~ 90% RH ±5%RH |
| Spannung | 5V |
| Stromstärke | 50mA |
Farbsensor
| Kommunikationsmodus | I2C |
| Kabel | Universal Sensor Kabel |
| Farberkennungsmodus | 0 (keine Farbe); 1 (rot); 2 (grün); 3 (blau); 4 (gelb); 5 (schwarz); 6 (weiß) |
| RGB Farbwerte | 0-200 (ein höherer Wert zeigt eine dunklere Farbe an) |
| Spannung | 5V |
| Strom | 50mA |
LED Modul
| Kommunikationsmodus | Monobus |
| Kabel | Universal Sensor Kabel |
| RGB Werte | 0 ~ 100% |
| Spannung | 5V |
Lichtsensor
| Kommunikationsmodus | I2C |
| Kabel | Universal Sensor Kabel |
| Farberkennungsmodus | 0 (keine Farbe); 1 (rot); 2 (grün); 3 (blau); 4 (gelb); 5 (schwarz); 6 (weiß) |
| RGB Farbwerte | 0-200 (höherer Wert zeigt dunklere Farbe an) |
| Spannung | 5V |
| Stromstärke | 50mA |
Drehpotentiometer
| Ausgangsspannung | 0 ~ 2500mV |
| Kommunikationsmodus | ADC |
| Kabel | Universalkabel für Sensoren |
| Rückgaberate | 0 ~ 407 (starke Schwankungen sind normal) |
| Spannung | 5V |
| Stromstärke | 50mA |
Microservo-Motor
| Kommunikationsmodus | PWM |
| Kabel | Universal Sensor Kabel |
| Servospeed | 0,1 m/sprung/60°/4,8V; 0,09 m/sprung/60°/6,0V |
| Drehmoment | 1,6 kg*cm/4,8V; 1,8 kg*cm/6,0V |
| PWM Frequenz | 50Hz/0,5-2,5MS |
| Spannung | 4,8V - 6,0V |
| Leerlaufstrom | 60mA |
Inhalt der Verpackung
- 1 Stück Joystick
- 1 Stück Doppeltaste
- 1 Stück PIR-Sensor
- 1 Stück Gestensensor
- 1 Stück Fotolektrischer Sensor
- 1 Stück Geräuschsensor
- 1 Stück Humiture-Sensor
- 1 Stück Farbsensor
- 1 Stück LED-Modul
- 1 Stück Lichtsensor
- 1 Stück Drehknopf-Potentiometer
- 1 Stück Microservo-Motor