Coșul este gol.
Înapoi la produse
Select destination country for correct VAT
DOBOT MAGICIAN PRO MG400 - Robotică desktop industrială
O braț robotic ușor cu o suprafață mai mică decât o foaie A4
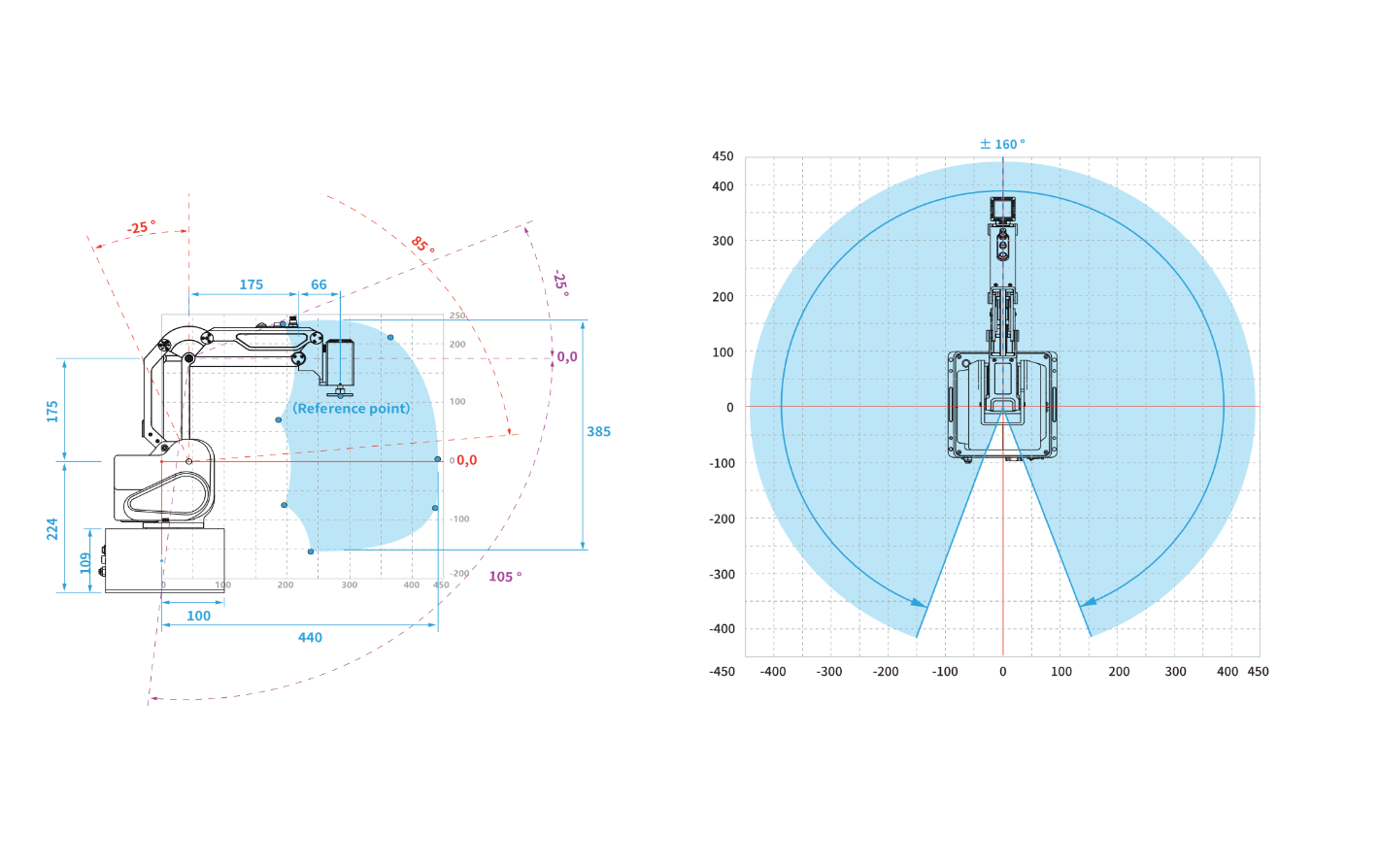
Datorită designului compact, MG400, cunoscut și sub numele de Magician Pro, se potrivește perfect și se instalează ușor pe sistemele de asamblare desktop. Greutatea sa totală de 8 kg și capacitatea sa maximă de încărcare de 750 g, combinată cu un braț de lucru de maximum 440 mm, fac din acest dispozitiv un maestru al lucrărilor la birou.
Precizia sa de 0,05 mm îl face potrivit pentru sarcini industriale, cum ar fi prelevarea de probe în cercetare sau asamblarea unor sisteme mici și complexe.
The area of ?the base is 190x190mm, so providing the appropriate space for the robot arm is not a challenge.

Performanța industrială
Datorită algoritmului său avansat de amortizare a vibrațiilor, Mely oferă o timp de stabilizare cu 60% mai rapid și un nivel de vibrații cu 70% mai redus în comparație cu celelalte produse din seria Magician, care sunt de asemenea roboți asistivi de birou.

4 axe, 4 moduri de mișcare
Un braț robotizat este capabil să lege două puncte de coordonate și să ajungă din punctul A în punctul B în 4 moduri:
Joint Interpolated Motion (Mișcare interpolată de articulație): Mișcarea se realizează cu programele GO și MoveJ, datorită cărora poziția finală a sculei nu este luată în considerare, iar articulațiile brațului robotizat sunt interpolate pentru a modifica poziția din punctul A în punctul B
Linearly Interpolated Motion (Mișcare interpolată liniar): Mișcarea se realizează cu programul Move, care leagă coordonatele punctului A și punctului B, examinând poziția sculei robotului, conducându-l direct de-a lungul liniei. În cazul mișcării liniare, se poate distinge utilizarea modului salt, în care scula efectuează mișcări între cele două puncte de coordonate sau, luând în considerare coordonatele punctului, aplică rotunjiri pentru a realiza o mișcare continuă.
ARC - Circular Interpolated Motion (Mișcare interpolată circulară): Robotul leagă punctele A și B cu ajutorul unui punct auxiliar C, de-a lungul unui arc, efectuând astfel o mișcare curbilinie, în care ia în considerare poziția sculei finale
Circle - Circular Interpolated Motion (Mișcare interpolată în formă de cerc): Robotul leagă punctele A și B cu ajutorul unui punct auxiliar C, descriind o formă de cerc, ținând cont de poziția sculei finale.
Simplicitate în fiecare caracteristică
Spre deosebire de roboții industriali de serie CR, modelul MG400 conține atât unitatea de control cât și brațul robotizat într-o singură întruchipare, ceea ce îl face mult mai compact în comparație cu colegii săi cu putere industrială.
Programming can be done in various ways. Some examples include:
Reproducerea mișcării unei unealte de finisat: Pentru aceasta, există modul de programare Teach & Playback, care este o metodă de programare pentru brațele robotizate, care nu necesită cunoștințe de programare pentru a seta parametrii unei sarcini. Programatorul poate mișca liber brațul robotizat ținând apăsat un buton de deblocare a siguranței, iar apoi il poate stabiliza în poziția respectivă eliberând butonul. Pe interfața programatorului, aceste coordonate pot fi vizualizate și stocate ca un punct de coordonate pe care brațul robotizat trebuie să le atingă în timpul execuției sarcinii. Prin salvarea acestor puncte, este posibilă mișcarea brațului robotizat fără a avea cunoștințe avansate de programare.
Programare bazată pe blocuri (Drag and Drop): Cunoscută și sub numele de programare grafică, aceasta facilitează învățarea programării prin vizualizarea funcțiilor, variabilelor și modurilor de lucru. Principiul sau de funcționare se bazează pe conectarea blocurilor, adică prin conectarea în serie a blocurilor care reprezintă diferite funcții, putem programa modul de funcționare al brațului robot.
LUA și Python Script: Datorită sintaxei ușor de înțeles și a numeroaselor biblioteci disponibile, acestea pot fi utilizate pentru programarea a numeroase procese de automatizare robotică.
DobotStudio Pro, care este mediul de dezvoltare pentru brațul robotic, vine în mod implicit cu bibliotecile necesare pentru controlul brațului robotic, astfel încât utilizatorii trebuie doar să parcurgă documentația și să creeze propriul lor program LUA sau Python pentru funcționarea brațului robotic.

Sisteme de coordonate
Sistemul de coordonate al brațului robotizat este împărțit în patru sisteme de coordonate:
Sistem de coordonate de bază: Sistemul de coordonate de bază determină coordonatele, poziția și mișcarea sculei finale, pe baza sistemului de coordonate de bază, definit de sistemul de coordonate cartezian.
Sistem de coordonate al articulațiilor: Sistemul de coordonate al articulațiilor este determinat de posibilitățile de mișcare ale fiecărei articulații.
Sistem de coordonate al sculei finale: Sistem de coordonate care determină distanța de translație și unghiul de rotație, al cărui origine și orientări se schimbă în funcție de poziția piesei de lucru situate pe platforma robotului.
Sistem de coordonate al utilizatorului: Sistem de coordonate mobil, utilizat pentru reprezentarea echipamentelor precum mobilier, bancuri de lucru. Originea și orientarea axelor pot fi determinate pe baza cerințelor locației, pentru măsurarea datelor punctuale în cadrul zonei de lucru și aranjarea comodă a sarcinilor.
GAMA LARGĂ DE ACCESORII ȘI UNELTE FINALE
Cu o gamă largă de scule și accesorii pentru mașini-unelte, acesta poate satisface chiar și cele mai speciale cerințe ale întreprinderilor. Compatibil cu cleme cu vid (necesită o sursă de vid) și cleme electrice, accesorii pentru transportoare cu bandă, accesorii pentru ghidaje liniare, unități de prelucrare a imaginilor și accesorii de comunicare, cum ar fi Modbus și PLC.
Cobot Universal Training Platform este un accesoriu universal pentru MG400, care include numeroase accesorii și aplicații.

Principalele caracteristici:
| Greutate | 8kg | |
Sarcină utilă maximă | 500g | |
Distanța maximă de acțiune | 440mm | |
Tensiune nominală | 48V DC | |
Cantitatea de încheieturi | 4 | |
Raza de mișcare a articulațiilor | J1 | ±160° |
J2 | ±85° | |
J3 | ±105° | |
J4 | ±360° | |
Viteză maximă a articulațiilor | J1/J2/J3/J4 | 300°/s |
Interfața I/O a sistemului de echipare finală | DI/DO | 2 |
Calea aerului | 1 | |
Control I/O | DI | 16 |
DO | 16 | |
Ethernet | 2 | |
USB 2.0 | 2 | |
Intrare pentru encoder | 1 | |
Precizia repetării | ±0.05mm | |
Comunicare | TCP/IP, Modbus TCP | |
Temperatura de funcționare | 0~45° | |
Performanță | 240W | |
Materiale | Aliaj de aluminiu, plastic ABS |
Conținutul pachetului
- 1buc Braț robotic Dobot MG400
- 1buc Cablu Ethernet
- 1buc Adaptor de rețea
- 1buc Dispozitiv de prindere cu ventuză (Pentru funcționarea dispozitivului de prindere cu ventuză este indispensabilă prezența produsului DOBOT MG400 MINI VACUUM SOURCE - Sursă de vacuum)
- 1buc Adaptor de flanșă pentru uneltele de capăt
- 1buc Comutator de oprire de urgență
- 1buc Placă de calibrare a poziției zero
- Accesorii (De exemplu, conectori de aer, șuruburi hexagonale interne)
- Document introductiv rapid
Producător
DOBOT
Exact color
Black
Model
Magician Pro MG400
Bluetooth
No
EAN
5904422361839
Numar articol
DBT-MAG-PRO
Masa
12 kg/bucată
Scrie prima recenzie pentru acest produs!