DOBOT COBOT CR12
Braț robotic industrial colaborativ
Dobot CR12 intră în clasa mai mare de roboți industriali, dimensiunile compacte și capacitatea sa de încărcare de 12kg permit automatizarea extinsă a producției prin intermediul brațului robotic. Există disponibile o varietate de unelte finale pentru diverse domenii și aplicații, făcându-l un instrument extrem de util în toate domeniile industriale. În plus, poate fi utilizat excelent ca instrument de formare și asistență în învățământul profesional și superior, în domenii precum stocare, simulare de producție și multe altele.
Caracteristici principale
| Nume produs | DOBOT CR12 |
| Greutate | 39.5 kg |
| Greutate maximă admisă | 12kg |
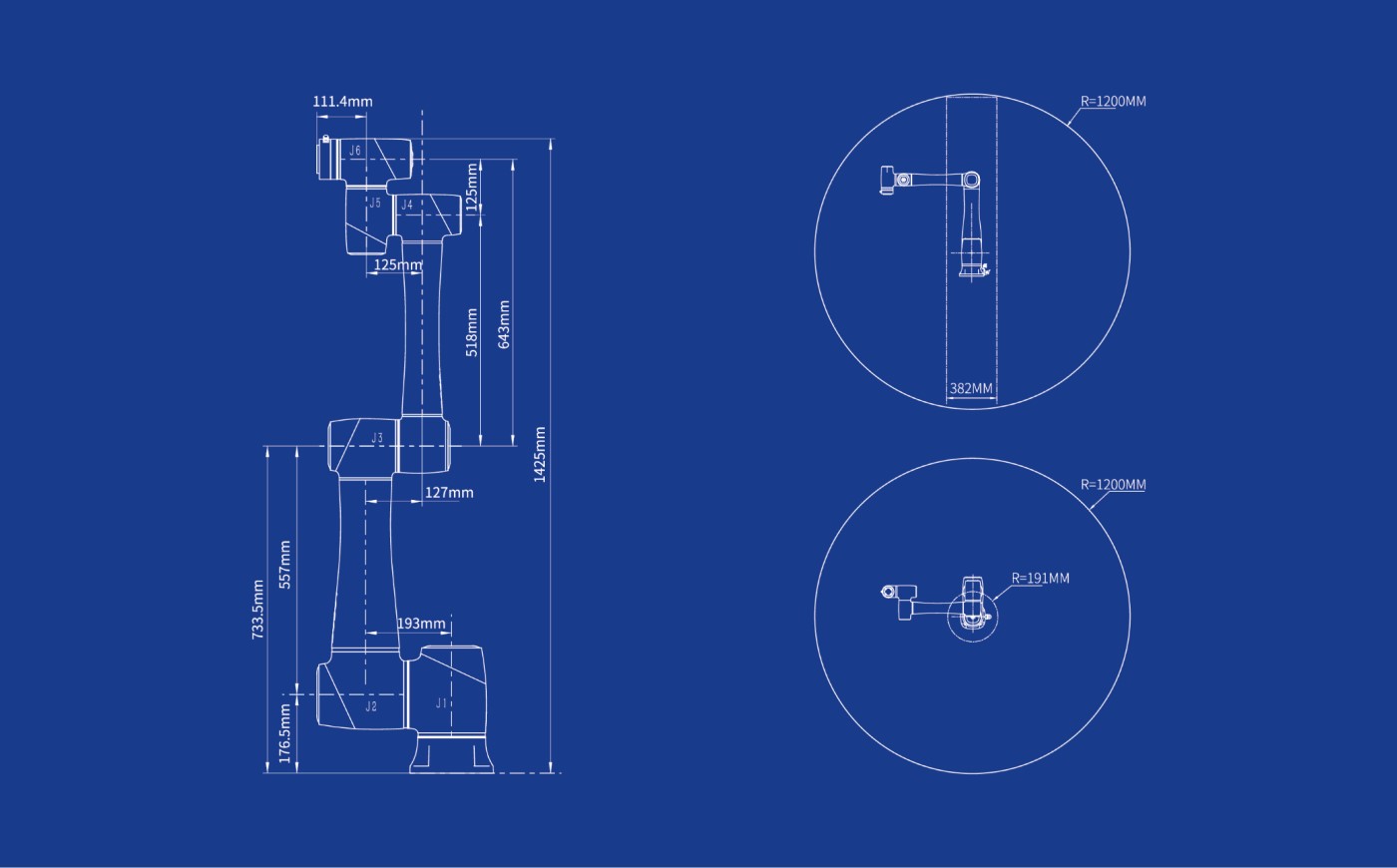
| Distanța maximă de acoperire | 1425mm |
| Tensiune nominală | DC48V |
| Viteza maximă a sculei de tăiere | 4m/s |
| Zona de mobilitate a articulațiilor | J1 | ±360° |
| J2 | ±360° |
| J3 | ±160° |
| J4 | ±360° |
| J5 | ±360° |
| J6 | ±360° |
| Viteza maximă a articulației | J1/J2 | 180°/s |
| J3/J4/J5/J6 | 180°/s |
| Interfața de intrare/ieșire a dispozitivului de achiziție | DI/DO/AI | 2 |
| AO | 0 |
| Interfață de comunicare | Comunicare | RS485 |
| Control I/O | DI | 16 |
| DO/DI | 16 |
| IN/IE | 2 |
| Encoder incremental ABZ | 1 |
Precizia repetiției | ±0,03 mm |
| Comunicare | TCP/IP, Modbus, EtherCAT, WIFI |
| Standardul IP | IP54 |
| Temperatura de funcționare | 0~45° |
| Putere | 350W |
| Materiale | Aliaj de aluminiu, plastic ABS |
Végszerszámok

Uneltele de sfârșit sunt acele instrumente care pot fi montate la capătul brațelor roboților. Seria de unelte finale DOBOT CR este compatibilă cu o gamă largă de unelte finale, astfel încât întreprinderile vor putea satisface chiar și cele mai specifice cerințe. Fie că este vorba de sudură, paletizare, încărcare, înșurubare, sortare, asamblare sau control de calitate, sunt disponibile cleme cu acționare pe bază de vid sau electronică, unități MODBUS pentru comunicare și automatizare, sau accesorii cu bandă rulantă și unități vizuale, care ajută brațul robot să-și atingă eficiența maximă, cum ar fi:
- Ambalare și paletizare - Manipulare - Lustruire - Surubuit - Lipire, dozare și sudare - Asamblare - Operare pe mașini - CNC - Control de calitate - Injectare cu plastic
Conținutul Pachetului
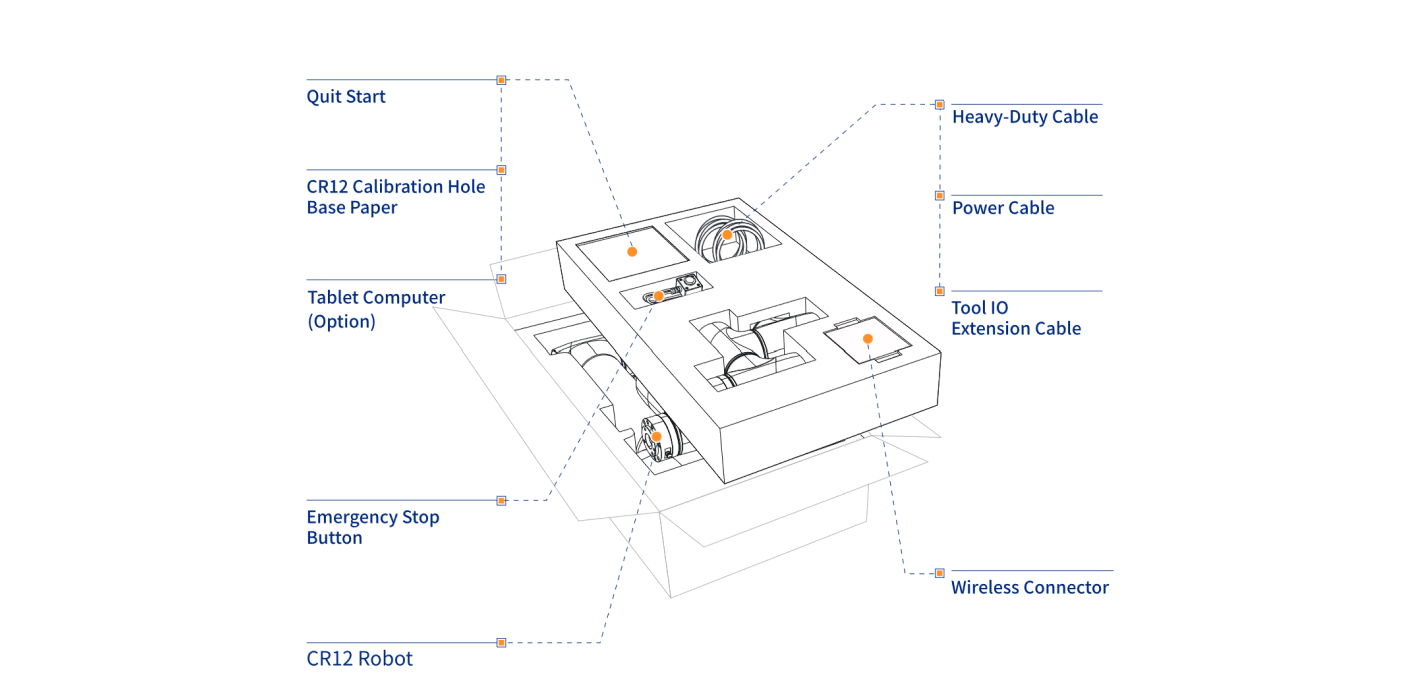
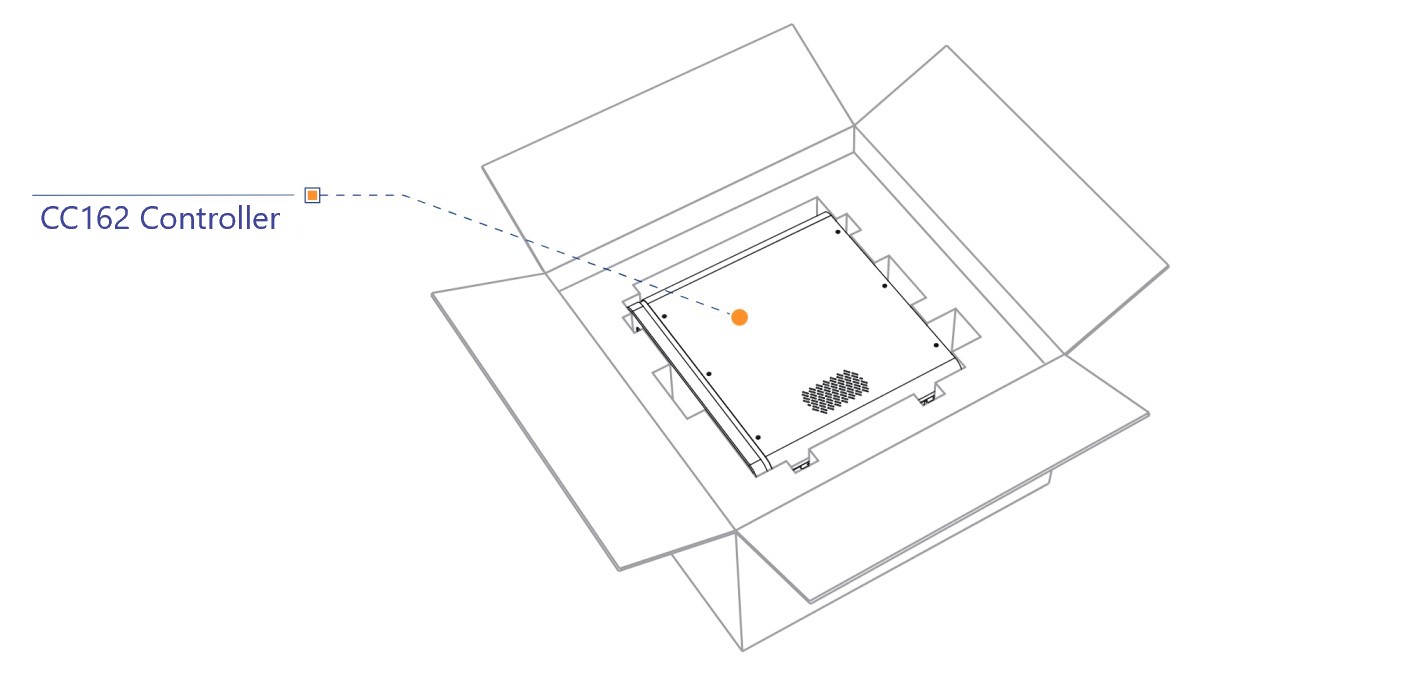
Un braț robotic este alcătuit din două unități. Un braț robotic și o unitate de control necesară pentru programarea sa. Unitatea de control este un computer care, comunicând cu brațul robotic, este capabil să-l controleze. Controlerul este prevăzut cu acele porturi IO la care pot fi conectate diverse accesorii, inclusiv întrerupătorul de oprire de urgență. Pentru a stabili comunicarea cu computerul sau dispozitivul inteligent, controlerul are un port USB la care se poate conecta un modul WIFI, precum și o priză Ethernet, în cazul în care doriți să controlați și să programați brațul robotic printr-o conexiune cu fir. *Apăsarea întrerupătorului de oprire de urgență va opri imediat funcționarea robotului. Pe lângă cele două unități, pachetul include cablurile de alimentare pentru unități și cablul IO necesar pentru conectare.
6 axe, 4 moduri de deplasare
Un braț robotic este capabil să se deplaseze de la punctul A la punctul B, prin unirea a două puncte de coordonate în 3 moduri: Mișcare interpolată prin articulații (Joint Interpolated Motion): Mișcarea poate fi realizată cu programele GO și MoveJ, datorită cărora brațul robotic își ajustează poziția din punctul A în punctul B prin interpolarea unghiurilor articulațiilor, fără a ține cont de poziția sculei finale. Mișcare interpolată liniar (Linearly Interpolated Motion): Mișcarea poate fi realizată cu programul Move, datorită căruia robotul, examinând poziția sculei finale, leagă coordonatele punctelor A și B, ghidând scula finală în linie dreaptă. În cazul mișcării liniare, se poate distinge utilizarea modului de săritură, în care scula finală fie se deplasează între punctele de coordonate ale punctelor sau, ținând cont de coordonatele punctelor, aplică o rotunjire pentru a realiza o mișcare continuă. Mișcare interpolată circulară (ARC - Circular Interpolated Motion): Robotul unește punctele A și B cu ajutorul unui punct auxiliar C de-a lungul unui arc, executând astfel o mișcare curbată, luând în considerare poziția sculei finale. Mișcare interpolată circulară într-o formă de cerc (Circle - Circular Interpolated Motion): Robotul unește punctele A și B cu ajutorul unui punct auxiliar C, realizând o mișcare în formă de cerc, ținând cont de poziția sculei finale.
Programarea poate fi realizată în mai multe moduri. Acestea includ:
Reproducerea mișcării instrumentului final: O metodă de programare asociată este Teach & Playback, care reprezintă modul de programare al brațelor robotice în care nu este nevoie de cunoștințe de programare pentru a seta parametrii unei sarcini. Programatorul poate muta liber brațul robotizat ținând apăsat un buton de deblocare a siguranței, apoi poate stabiliza poziția acestuia eliberând butonul. Pe interfața de programare putem vizualiza aceste coordonate și le putem stoca ca un punct de coordonate pe care brațul robotizat trebuie să-l atingă în timpul executării sarcinii. Salvând punctele, astfel se poate acționa brațul robotic fără a avea cunoștințe de programare.
Programare bazată pe blocuri (Drag and Drop): Cunoscută și sub denumirea de programare grafică, aceasta facilitează învățarea programării prin vizualizarea funcțiilor, variabilelor și modurilor de funcționare. Principiul său de funcționare se bazează pe conectarea blocurilor, adică prin conectarea în serie a blocurilor care reprezintă diferite funcții, putem programa funcționarea unui braț robotic.
Script Python: În prezent, Python este unul dintre cele mai populare limbaje de programare, fiind prima opțiune a oricărui programator începător. Datorită sintaxei ușor de înțeles și a numeroaselor sale biblioteci, este folosit nu doar pentru automatizarea proceselor, ci și pentru crearea de inteligență artificială. De aceea, chiar și robotică a ales limbajul Python pentru a exploata la maxim capacitățile roboților.
DobotStudio, care este mediul de dezvoltare pentru brațul robotic, vine în mod implicit cu bibliotecile necesare pentru controlul brațului robotic, astfel că singura lor sarcină este să parcurgă documentația și să creeze propriul program Python pentru funcționarea brațului lor robotic.

Sisteme de coordonate
Sistemul de coordonate al brațului robotizat este împărțit în patru sisteme de coordonate: Sistem de coordonate bază: Sistemul de coordonate al bazei determină coordonatele, poziția și mișcarea sculei finale, pe baza sistemului de coordonate al bazei, definit de un sistem de coordonate cartezian. Sistem de coordonate articulații: Sistemul de coordonate al articulațiilor este determinat de mișcările posibile ale fiecărei articulații Sistem de coordonate al sculei finale: Sistemul de coordonate care determină distanța de translație și unghiul de rotație, a cărui origine și orientări variază în funcție de poziția piesei de lucru plasate pe platforma robotului Sistem de coordonate utilizator: Sistem de coordonate mobil, utilizat pentru reprezentarea unor echipamente precum mobilier, bănci de lucru. Originea și orientarea axelor pot fi definite în funcție de cerințele de pe teren, pentru a măsura datele punctelor în cadrul zonei de lucru și pentru a aranja sarcinile convenabil.
Puncte de singularitate
Când un robot se deplasează în sistemul de coordonate cartezian, viteza rezultantă a celor două axe nu poate fi în orice direcție dacă direcțiile sunt aliniate, ceea ce duce la o deteriorare a gradelor de libertate ale robotului. Robotul are trei puncte de singularitate.
Investiție sigură, fiabilitate remarcabilă
Seria de brațe robotizate colaborative CR se remarcă prin construcția sa puternică și stabilă, promițând o durată de viață de până la 32000 de ore, fiind totodată caracterizată de costuri operaționale reduse. Astfel, membrii seriei CR nu sunt doar siguri, ci și investiții rentabile.
