DOBOT COBOT CR16
Robot colaborativ industrial CR16

Dobot CR16 se încadrează în clasa de dimensiuni mai mari a roboților industriali, datorită dimensiunii compacte și capacitatea sa de încărcare de 16 kg, permițând automatizarea largă a producției prin intermediul brațului robot. Sunt disponibile o multitudine de scule finale de diferite tipuri și domenii de utilizare, făcându-l un instrument extrem de util în toate domeniile industriale. În plus, poate fi utilizat cu succes ca un instrument de instruire și asistență în învățământul profesional și superior, pentru stocare, simulare a producției și multe alte domenii.
Installation flexibilă, execuție rapidă
Îmbunătățiți flexibilitatea fluxului de lucru și eficiența producției utilizând un robot colaborativ CR ușor de instalat, pe care îl puteți asambla în doar 20 de minute și puteți începe să îl utilizați în cel mult 1 oră.
Ușor de accesat, ușor de învățat
Software-ul și tehnologia aritmetică a Dobot fac funcționarea și manipularea seriei de roboți colaborativi CR inteligente și simple. Datorită software-ului și instruirii manuale, poate imita cu precizie mișcările umane. Nu este nevoie de cunoștințe de programare.
Sistem avansat de securitate și multe altele
Un avantaj al roboților colaborativi este că sunt echipați cu senzori de presiune în carcasă. Acești senzori permit oprirea robotului și întregului sistem în cazul în care presiunea depășește un anumit prag. Astfel, eficiența și siguranța muncii între om și robot ajung la un nivel superior.
Extensibil și compatibil
Seria de roboți colaborativi CR este recomandată datorită gamei variate de instrumente finale și interfețelor de comunicare universale. Seria de roboți CR, cu mai multe interfețe I/O și de comunicare, poate fi extinsă și este compatibilă cu o mulțime de dispozitive pentru vârfuri de braț. Ca rezultat, roboții CR satisfac o varietate de nevoi și pot fi utilizați în diferite situații de aplicare.
Principalele caracteristici
| Nume produs | DOBOT CR16 |
| Greutate | 20kg |
| Greutate maximă admisă | 16kg |
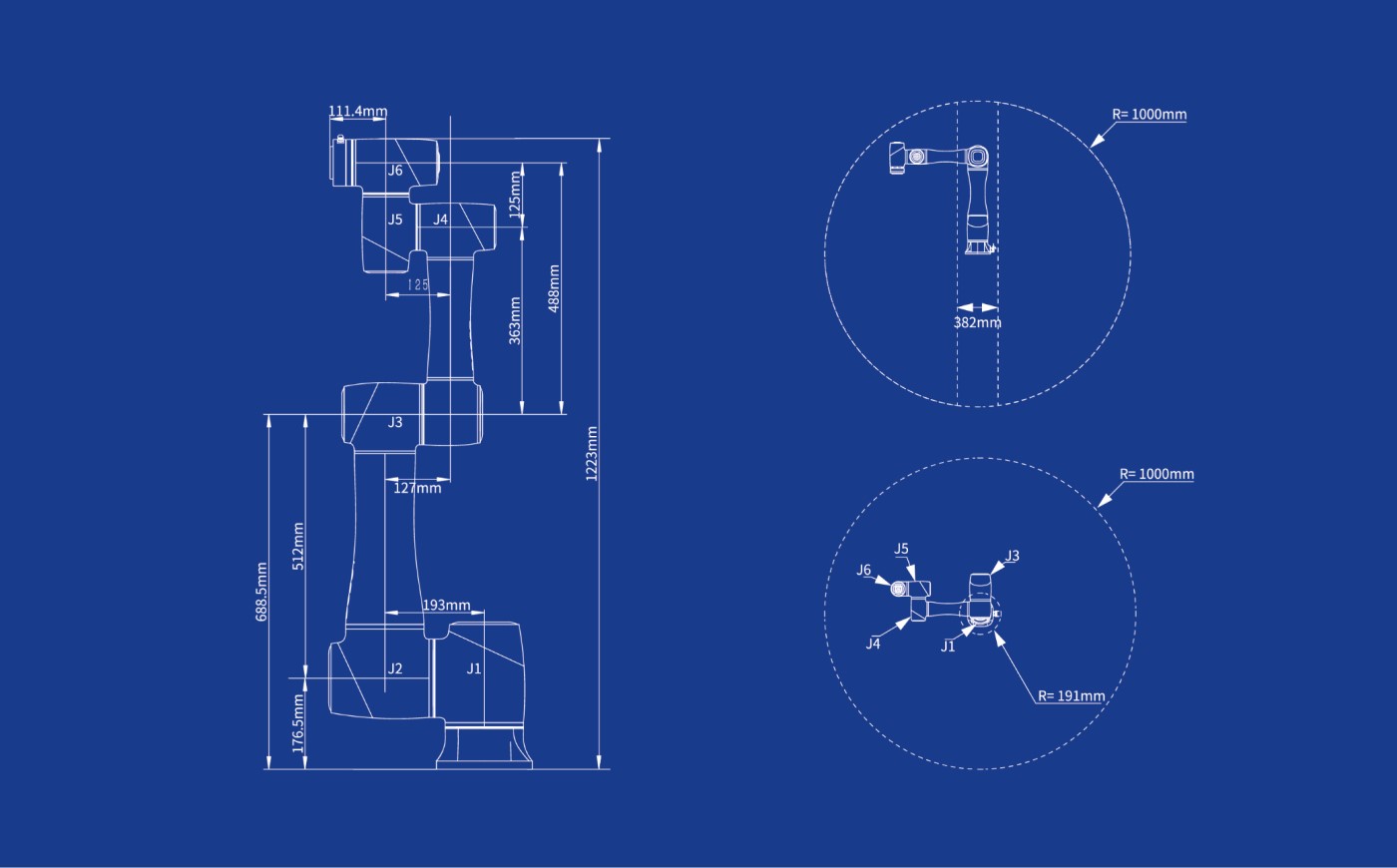
| Distanță maximă de acoperire | 1223mm |
| Tensiune nominală | 48V DC |
| Viteza maximă a echipamentului de sfârșit | 3m/s |
| Mobilitatea articulațiilor | J1 | ±360° | ±360° |
| J2 | ±360° | ±360° |
| J3 | ±160° |
| J4 | ±360° | ±360° |
| J5 | ±360° | ±360° |
| J6 | ±360° | ±360° |
| Viteză maximă a articulațiilor | J1/J2 | 120°/s |
| J3/J4/J5/J6 | 180°/s |
| Interfețele de intrare/ieșire pentru echipamentul final | DI/DO/AI | DI/DO/AI | DI/DO/AI | DI/DO/AI | DI/DO/AI | DI/DO/AI | 2 |
| AO | 0 |
| Interfață de comunicare | Comunicare | RS485 |
| Control I/O | DI | 16 |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
| DO/DI |
16 | | AI/AO |
2 | | Encoder incremental ABZ | 1 |
| Precisione de repetiție | ±0.03mm |
| Comunicare | TCP/IP, Modbus, EtherCAT, WIFI |
| Standardul IP | IP54 | IP54 |
| Temperatura de funcționare | 0~45° |
| Performanță | 350W |
| Materiale | Aliaj de aluminiu, plastic ABS |
Végszerszámok

Végszerszámok, ceea ce sunt acele instrumente ce pot fi montate la capătul brațelor roboților. Seria de roboți colaborativi DOBOT CR este compatibilă cu o gamă largă de acceosrii pentru vârfurile de braț, astfel încât să poată satisface chiar și cele mai specifice nevoi ale întreprinderilor.
- Ambalare și paletizare
- Manipulare
- Lustruire
- Înșurubare
- Lipire, dozare și sudură
- Asamblare
- Operare mașină
- CNC
- Control calitate
- Turnare prin injecție
Conținutul Pachetului
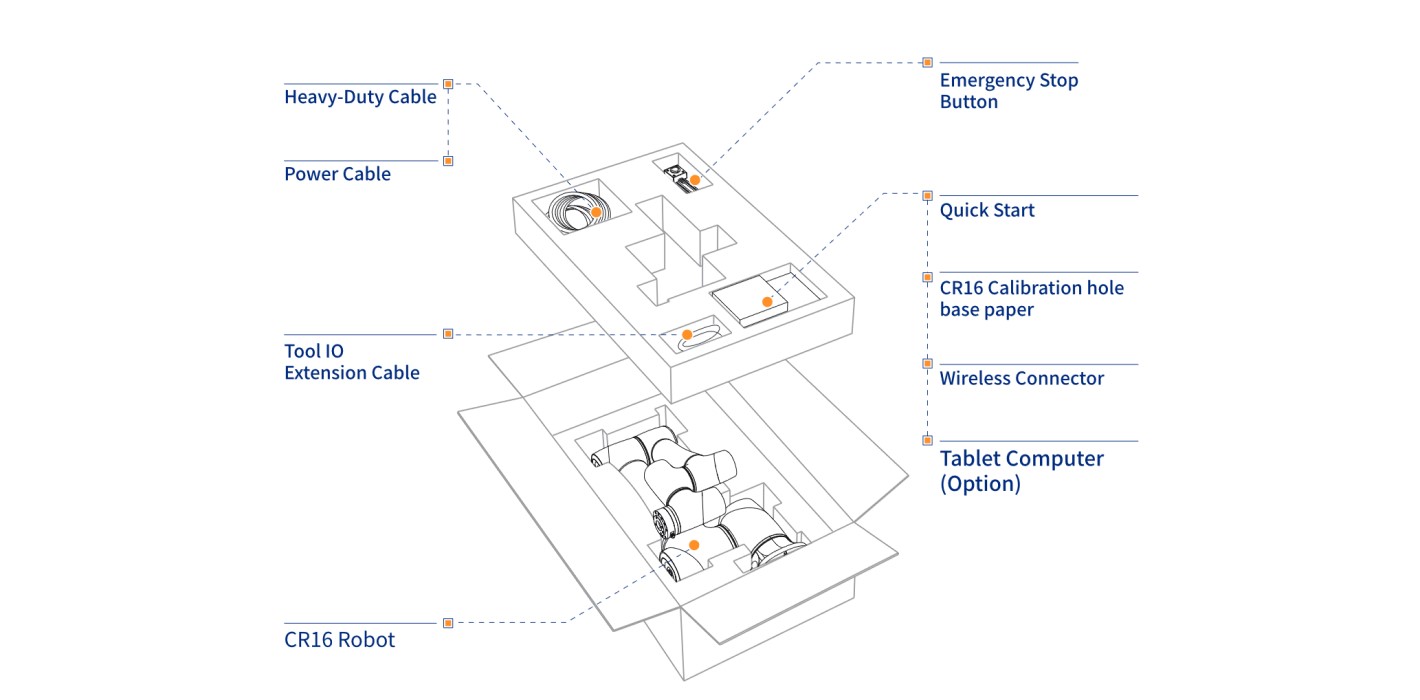
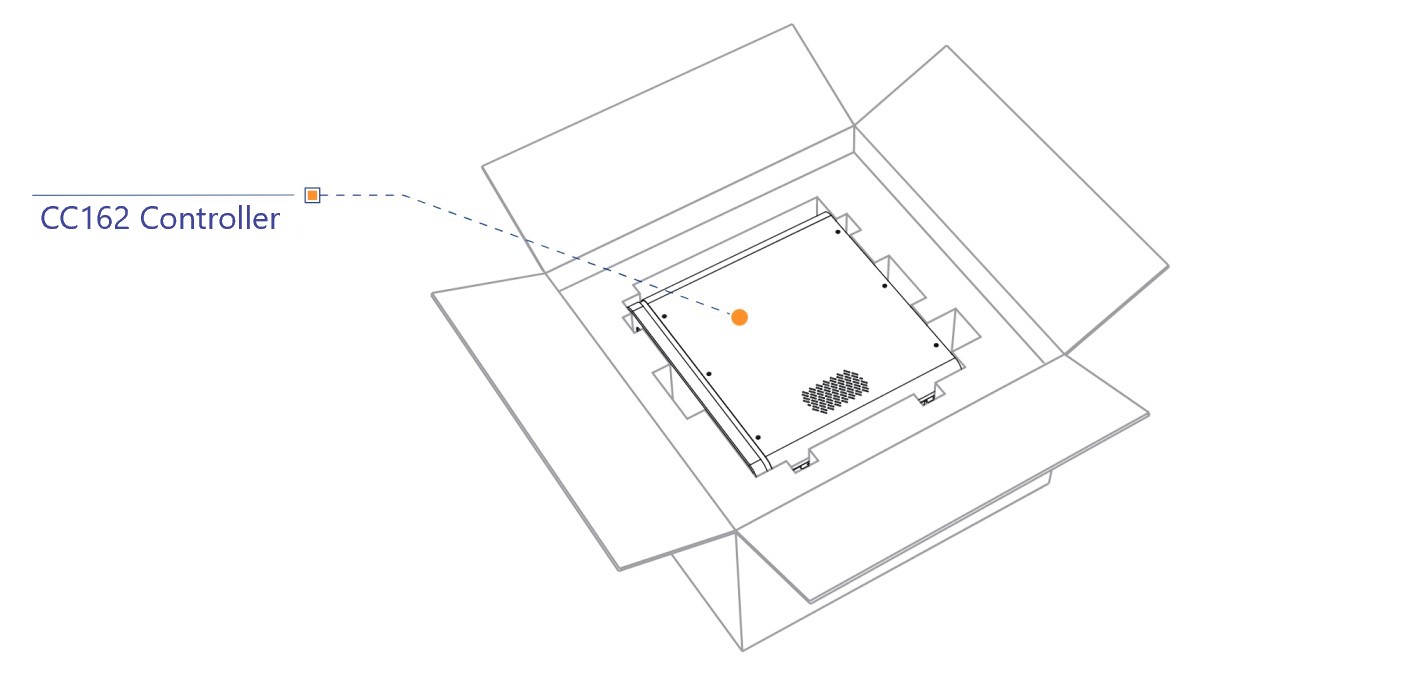
Un braț robotic este alcătuit din două unități: un braț robotic și o unitate de control necesară pentru programarea acestuia. Unitatea de control este un computer, care poate controla brațul robotic prin comunicare. Controlerul dispune de acele porturi IO la care pot fi conectate diverse accesorii, inclusiv comutatorul de oprire de urgență. Pentru a stabili comunicarea cu computerul sau dispozitivul dumneavoastră inteligent, controlerul are un port USB la care poate fi conectat modulul WIFI, precum și un conector Ethernet pentru a controla și programa brațul robotic printr-o conexiune cu fir.
*Apăsarea comutatorului de oprire de urgență oprește imediat funcționarea robotului.
Pe lângă cele două unități, pachetul conține cablurile de alimentare ale unităților și cablul IO necesar pentru conexiune.
6 axe, 4 moduri de mișcare
Un robot poate ajunge de la punctul A la punctul B conectând două puncte de coordonate în 3 moduri:
Mișcarea interpolată a încheieturii (Csukló interpolált mozgás): Miscarea poate fi realizată folosind programele GO și MoveJ, ceea ce permite modificarea poziției robotului prin interpolarea unghiurilor încheieturilor în loc să ia în considerare poziția finală a instrumentului în punctele A și B.
Miscarea interpolată liniar (Linearly Interpolated Motion): Miscarea poate fi realizată folosind programul Move, prin care robotul conectează coordonatele punctului A și punctului B, urmărind poziția sculei finale pe o linie dreaptă. În cazul mișcării liniare, poate fi utilizată modalitatea de saltare (jump mode), în care scula finală se deplasează între cele două puncte de coordonate sau până la o poziție finală, luând în considerare rotunjirea coordonatelor pentru a obține o mișcare continuă.
ARC - Mișcare interpolată circular (Körkörösen interpolált mozgás): Un robot conectează punctele A și B printr-un punct C auxiliar, realizând astfel o mișcare curbată, luând în considerare poziția finală a piesei.
Cerc - Mişcare Interpolată Circulară: Un robot execută mișcarea într-o formă circulară, conectând punctele A și B cu ajutorul punctului C, luând în considerare poziția instrumentului final.
Programarea poate fi realizată în mai multe moduri. Acestea includ, de exemplu:
Reproducerea mișcării instrumentului final: O modalitate de programare asociată cu acest lucru este programarea Teach & Playback, care reprezintă o metodă de programare a brațelor robotice în care nu este necesară cunoașterea programării pentru a seta parametrii unei sarcini. Prin ținerea apăsată a unui buton care deblochează un încuietoare de siguranță, programatorul poate mișca liber brațul robotic, apoi îl poate stabili într-o anumită poziție eliberând butonul. Aceste coordonate pot fi vizualizate și stocate în interfața programatorului ca punct de coordonate pe care brațul robotic trebuie să-l atingă în timpul executării sarcinii. Astfel, prin salvarea acestor puncte, se poate realiza mișcarea brațului robotic fără cunoștințe de programare.
Programarea bazată pe blocuri (Drag and Drop): Cunoscută și sub numele de programare grafică, aceasta facilitează învățarea programării prin vizualizarea funcțiilor, variabilelor și modurilor de funcționare. Principiul de funcționare se bazează pe conectarea blocurilor, adică prin conectarea în serie a blocurilor care reprezintă funcțiile individuale, putem programa funcționarea unui braț robotic.
Script-ul Python: Este alegerea preferată a multor programatori începători, iar limbajul de programare Python este extrem de popular în prezent. Datorită sintaxei sale ușor de înțeles și numeroaselor biblioteci, este folosit nu doar pentru automatizarea proceselor, ci și pentru crearea de inteligență artificială. Prin urmare, robotica a ales limbajul de programare Python pentru a exploata la maxim capabilitățile roboților.
DobotStudio, the development environment for the robot arm, comes with the necessary libraries for controlling the robot arm by default, so all you need to do is review the documentation and create your own Python programs to operate your robot arm.

Sisteme de coordonate
Sistemul de coordonate al bratului robotic este împărțit în patru sisteme de coordonate:
Sistem de coordonate bază: Sistemul de coordonate de bază determină coordonatele, poziția și mișcarea uneltei finale, bazat pe sistemul de coordonate de bază, care este determinat de sistemul de coordonate cartezian.
Sistem de coordonate articulație: Sistemul de coordonate al articulațiilor este determinat de gama de mișcări posibile ale fiecărei articulații
Sistem de coordonate al uneltei finale: Sistemul de coordonate care determină distanța de translație și unghiul de rotație, al cărui origini și orientări variază în funcție de poziția piesei de lucru de pe suportul robotului
Sistem de coordonate utilizator: Sistem de coordonate mobil, utilizat pentru reprezentarea dispozitivelor precum obiecte de mobilier, bănci de lucru. Originea și orientarea axelor pot fi determinate pe baza cerințelor de la fața locului pentru a măsura datele punctelor din cadrul zonei de lucru și pentru o dispunere convenabilă a sarcinilor.
Puncte singulare
Când robotul se mișcă în sistemul de coordonate cartezian, viteza rezultantă a celor două axe nu poate fi oricare în direcții, dacă direcțiile sunt aliniate, ceea ce duce la o degradare a gradelor de libertate ale robotului.
Robotul are trei puncte de singularitate.
Investiție sigură, fiabilitate remarcabilă
Seria de roboți colaborativi CR are o calitate de constructie puternică și stabilă, garantând o durată de viață de până la 32000 de ore, iar costurile operaționale reduse sunt, de asemenea, caracteristice. Astfel, membrii seriei CR nu sunt doar investiții sigure, ci și profitabile.
