DOBOT COBOT CR3S
Braț robotizat industrial colaborativ cu accesoriu SafeSkin
CR3S este cheia unei colaborări sigure între oameni și roboți. Proiectat cu add-on-ul DOBOT SafeSkin, brațul robotizat CR3S este conceput pentru a simplifica liniile de automatizare și pentru a oferi un nivel ridicat de siguranță pentru oameni.

Dobot CR3 aparține clasei de cobots industriali de dimensiuni mai mici, dimensiunile sale compacte și capacitatea de încărcare de 3 kg permit o gamă largă de automatizare a producției cu ajutorul brațului robotic. Este disponibil cu o gamă largă de instrumente și aplicații finale, ceea ce îl face un instrument extrem de util pentru toate domeniile industriale. Este, de asemenea, un instrument excelent pentru formarea profesională, învățământul superior, depozitarea, simularea producției și multe alte aplicații.
INSTALARE FLEXIBILĂ, IMPLEMENTARE RAPIDĂ
Îmbunătățiți flexibilitatea fluxului de lucru și eficiența producției cu un robot colaborativ CR ușor de implementat, care poate fi instalat în doar 20 de minute și poate fi pus în funcțiune în maximum o oră. După conectarea consolei de control și atașarea brațului robotului, tot ce trebuie să faceți este să conectați cele două dispozitive și să porniți sistemul.
UȘOR DE ACCESAT, UȘOR DE ÎNVĂȚAT

Software-ul și tehnologia aritmetică Dobot fac ca seria CR de roboți colaborativi să fie inteligentă și ușor de operat și gestionat. Datorită software-ului și antrenamentului manual, poate imita cu precizie mișcările umane. Nu sunt necesare cunoștințe de programare. Acest lucru este facilitat de mediul său de dezvoltare bazat pe blocuri, care elimină necesitatea de a învăța cum să utilizeze sisteme și funcții complexe de bibliotecă de programare. Dacă aveți cunoștințe anterioare de programare, sistemul robotului acceptă limbajul de programare Python, astfel încât să puteți profita din plin de robot.
Sistem de securitate avansat și multe altele
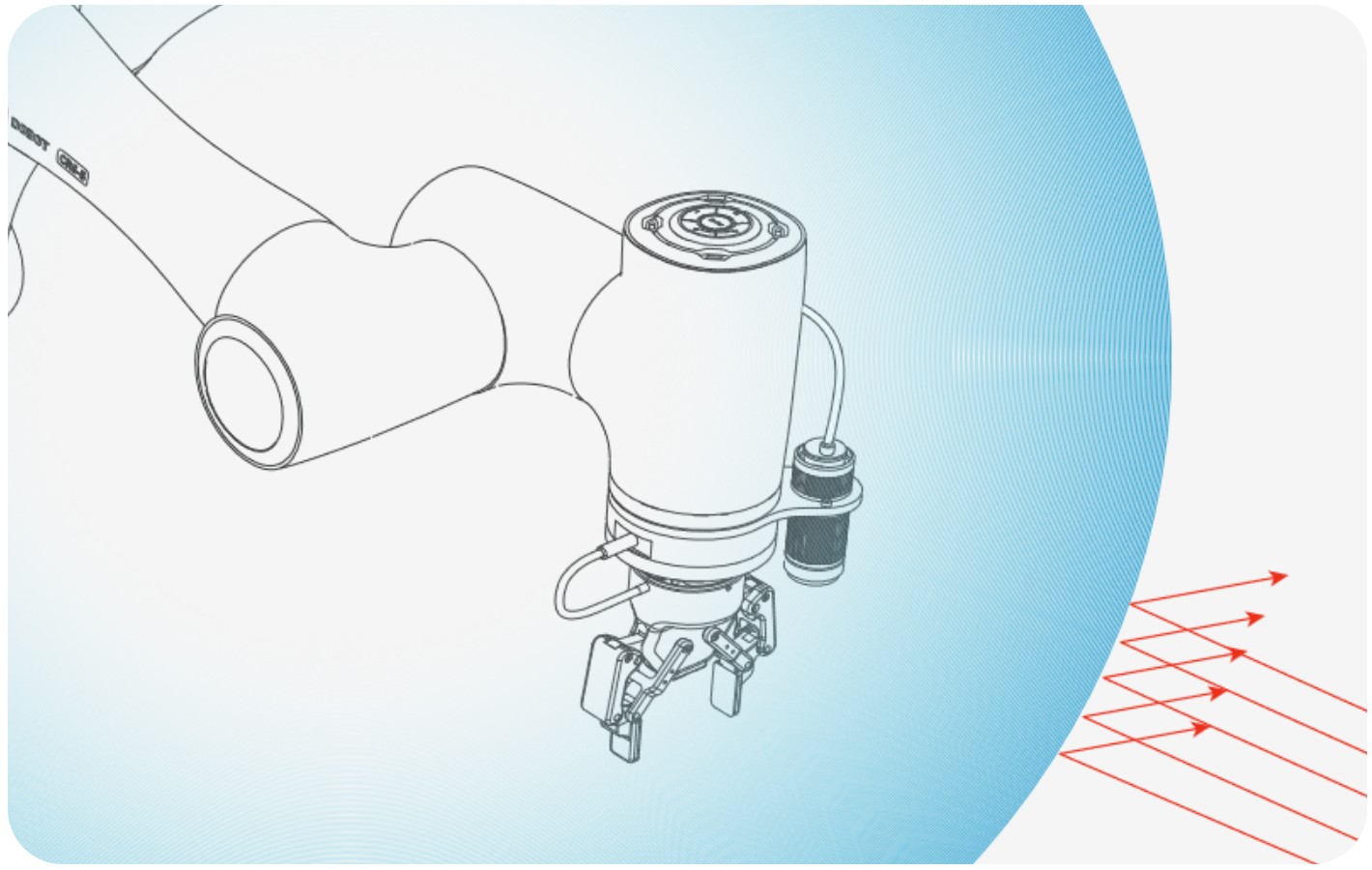
Avantajul roboților colaborativi constă în faptul că aceștia sunt dotați cu senzori de presiune în carcasele lor, astfel încât, dacă presiunea depășește un anumit prag, robotul își oprește activitatea curentă, iar sistemul nu va continua până când presiunea nu este eliberată. Cu acest adaos, eficiența și siguranța lucrului om-robot sunt duse la noi niveluri.
Tehnologia SafeSkin - Exploatarea inducției electromagnetice
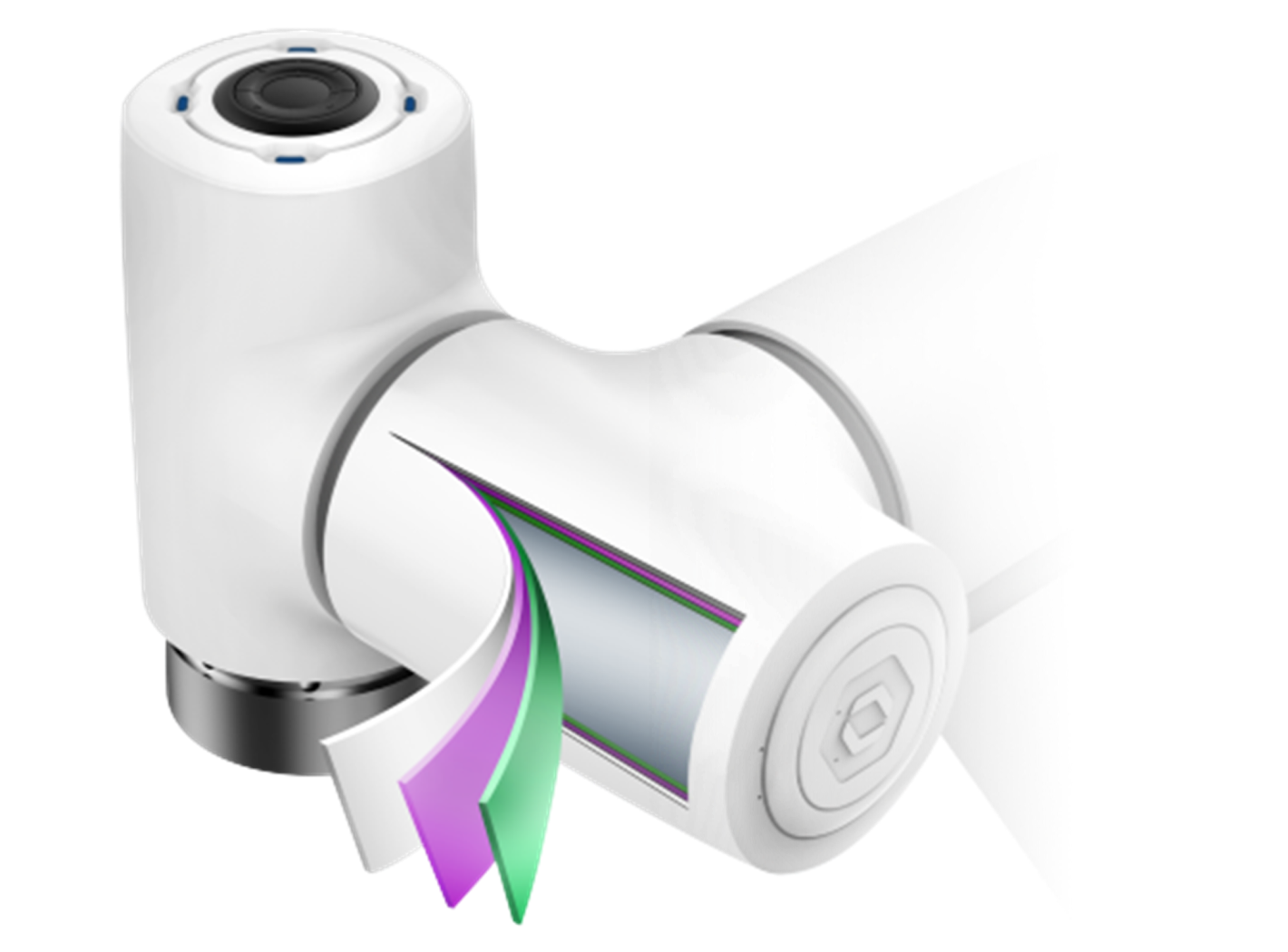
Dezvoltarea de siguranță brevetată de DOBOT care permite brațului robotic nu numai să prevină accidentele, ci și să le evite. Utilizând inducția electromagnetică, un capac de silicon cu senzori asigură că robotul este conștient de împrejurimile sale. Învelișul creează un câmp electromagnetic de-a lungul învelișului robotului, care este refractat de orice obiect străin din mediul său sau care se mișcă în jurul său, determinând senzorul să trimită un semnal către unitatea centrală de procesare a robotului. Acest lucru face ca robotul să se oprească.
Funcționarea sa este suspendată până când integritatea câmpului magnetic este restabilită, adică până când obiectul străin părăsește mediul imediat al robotului. Odată ce traiectoria sa de funcționare este din nou liberă, robotul își reia automat activitatea fără a pune în pericol procesul de producție.
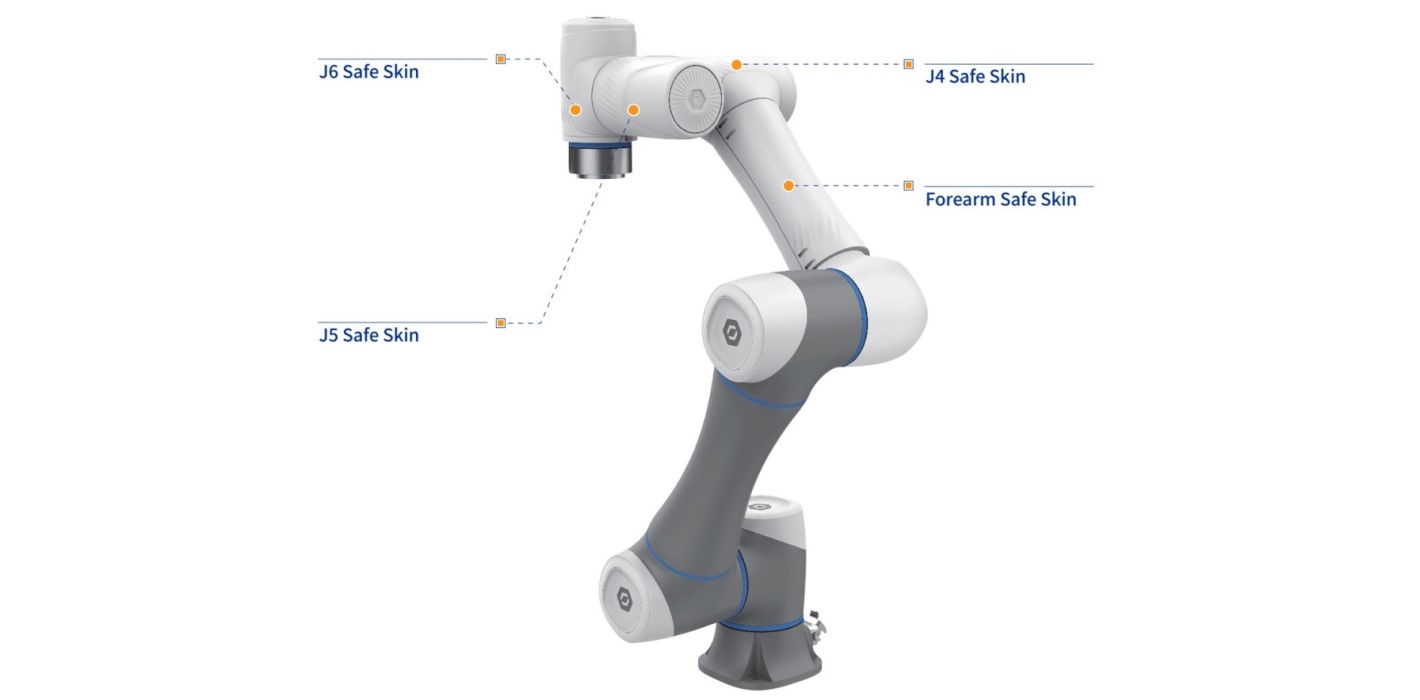
Pachetul SafeSkin include 4 unități de acoperire. Capacul pentru antebraț, capacul pentru încheietura mâinii J4, capacul pentru încheietura mâinii J5 și capacul pentru articulație J6.
Sensibilitatea variază, de asemenea, în funcție de diferitele materiale. În timp ce pielea umană se află la cel mai înalt nivel (acoperirea este cea mai sensibilă), plasticul se află la cel mai scăzut. Parametrii legați de prevenire, cum ar fi accelerația și viteza, pot fi setați în software-ul de dezvoltare a robotului.
Investiție sigură, fiabilitate remarcabilă
Calitatea constructivă robustă și stabilă a seriei CR de brațe robotice colaborative promite o durată de viață de până la 32.000 de ore, combinată cu costuri de funcționare reduse, ceea ce face din seria CR nu numai o investiție sigură, ci și o rentabilitate a investiției.
Parametrii
Denumirea produsului | DOBOT CR3 |
Greutate | 16.5kg |
Sarcina maximă de lucru | 3kg |
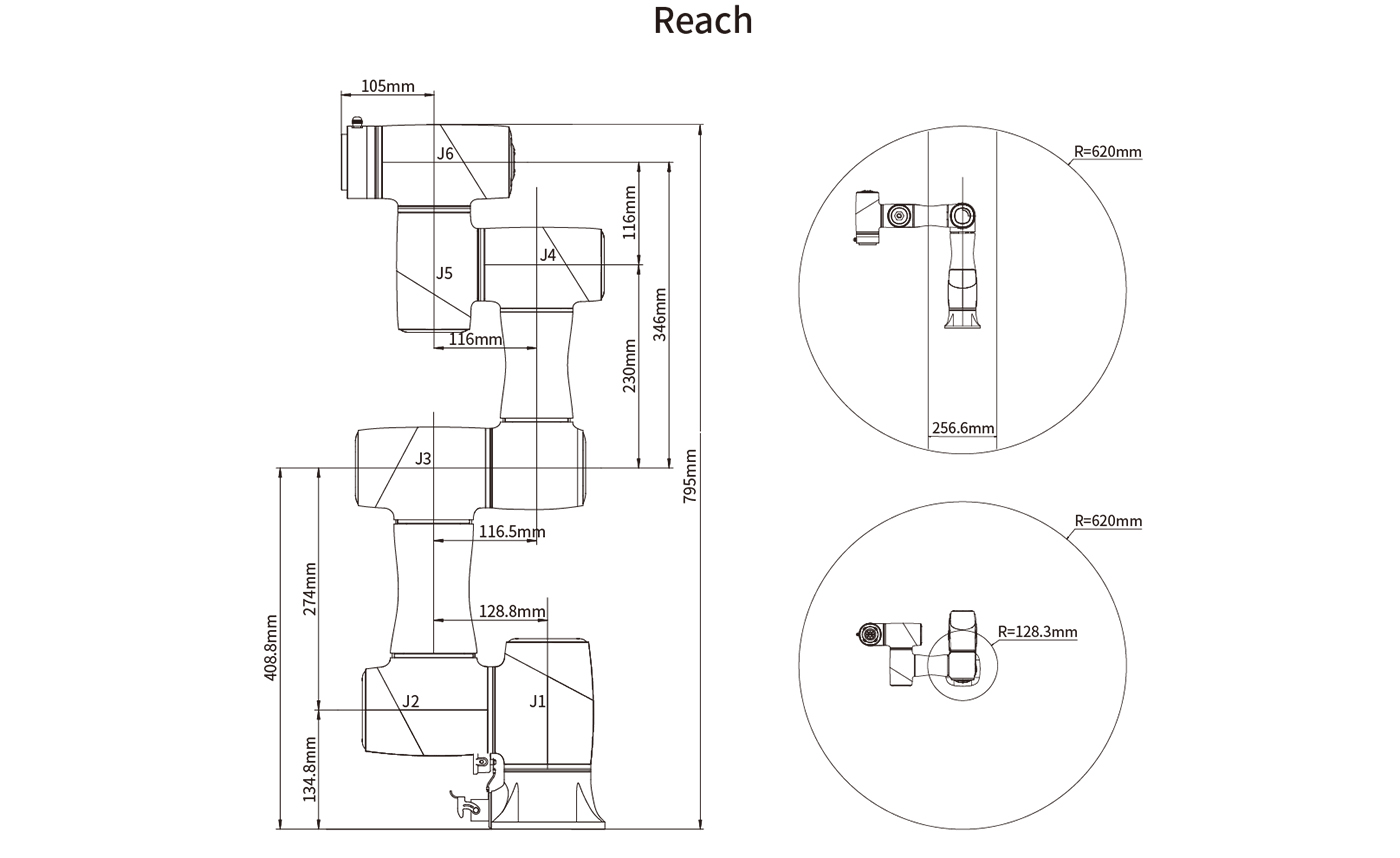
Raza maximă de lucru | 795mm |
Tensiune nominală | DC48V |
Viteza maximă a sculei finale (TCP) | 2m/s |
Gama de articulații | J1 | ±360° |
J2 | ±360° |
J3 | ±155° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Viteza maximă a articulațiilor | J1/J2 | 180°/s |
J3/J4/J5/J6 | 180°/s |
Interfață de intrare/ieșire a sculei finale | DI/DO/AI | 2 |
AO | 0 |
Interfață de comunicare | Comunicare | RS485 |
Controler I/O | DI | 16 |
DO/DI | 16 |
AI/AO | 2 |
ABZ Incremental Encoder | 1 |
Acuratețe repetată | ±0.02mm |
Comunicare | TCP/IP, Modbus, EtherCAT,WIFI |
Evaluarea IP | IP54 |
Temperatura de lucru | 0~45° |
Putere | 120W |
Materiale | Aluminum alloy, ABS plastic |
Unelte de capăt

Uneltele de capăt sunt dispozitivele care pot fi montate la capetele brațelor robotului. Seria de roboți colaborativi DOBOT CR este compatibilă cu o gamă largă de scule finale, astfel încât va putea satisface chiar și cele mai specifice nevoi ale afacerii dumneavoastră. Fie că este vorba de sudare, paletizare, încărcare, înșurubare, sortare, asamblare sau control al calității, orice proces poate fi echipat cu dispozitive de prindere cu vid sau cu acționare electronică, unități MODBUS pentru comunicare și automatizare sau accesorii pentru transportoare și unități vizuale pentru a maximiza eficiența brațului robotului.
Conținutul pachetului
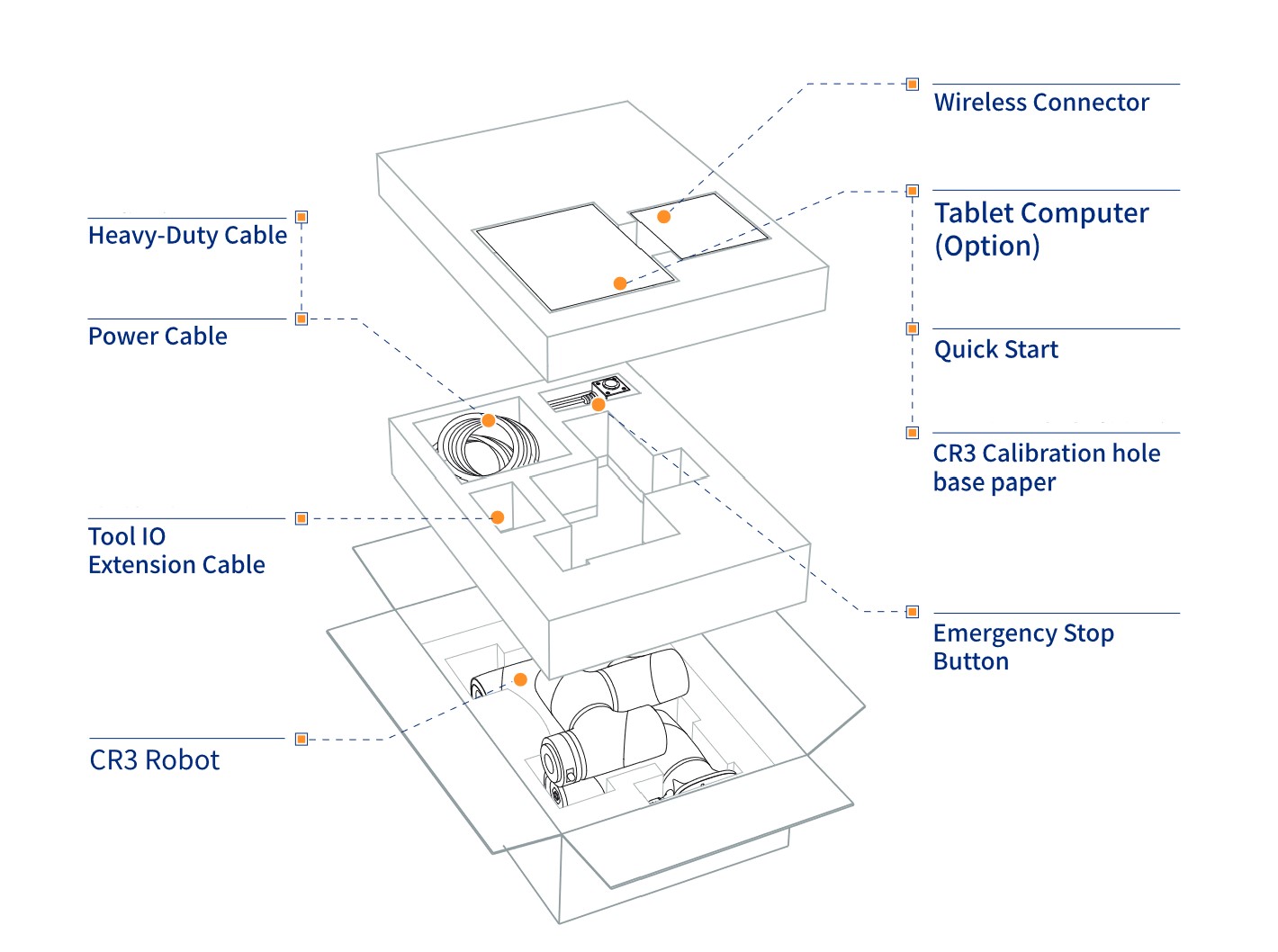
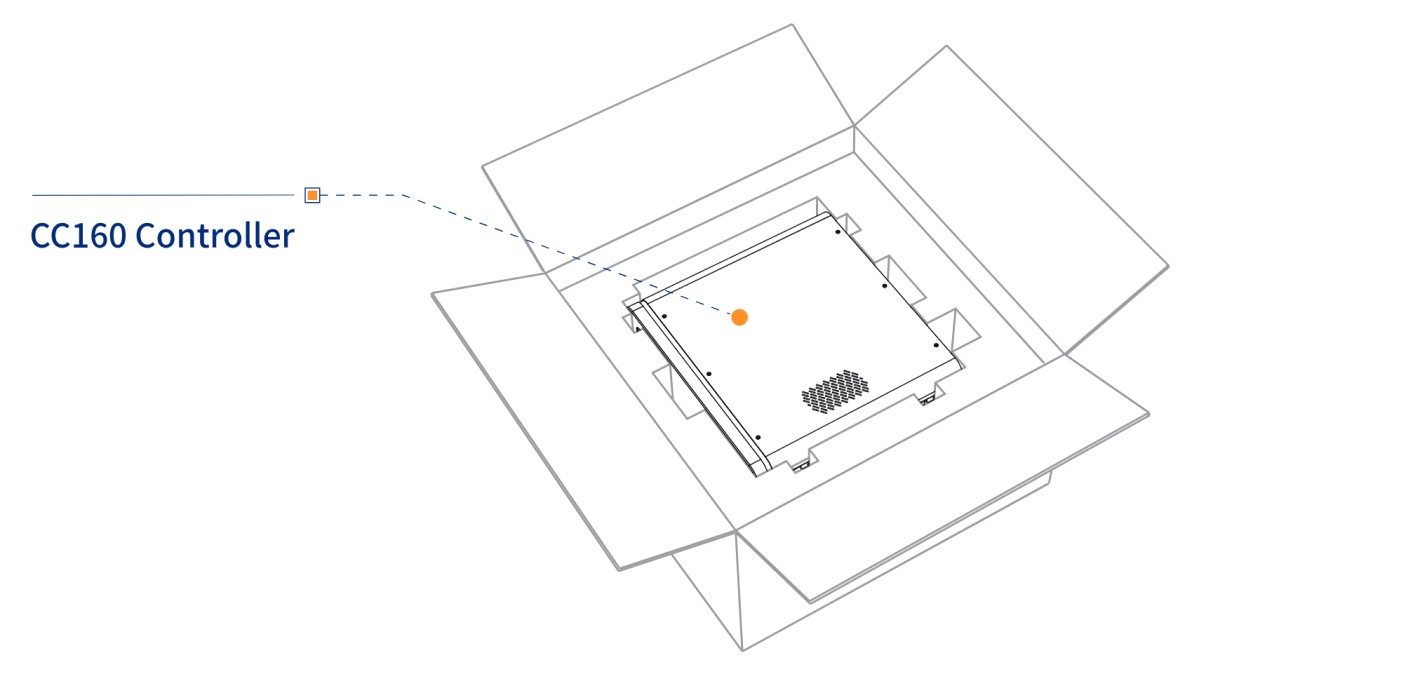
Brațul robotului este format din două unități. Un braț robotizat și o unitate de control pentru programarea acestuia. Unitatea de control este un computer care comunică cu brațul robotic pentru a-l controla. Unitatea de comandă are porturile IO la care pot fi conectate diverse accesorii, inclusiv întrerupătorul de oprire de urgență. Pentru a stabili comunicarea cu computerul sau cu dispozitivul inteligent, unitatea de comandă are un port USB pentru a conecta modulul WIFI și un port Ethernet dacă doriți să controlați și să programați brațul robotizat prin intermediul unei conexiuni prin cablu. Apăsarea întrerupătorului de oprire de urgență va opri robotul imediat. În plus față de cele două unități, pachetul include cablurile de alimentare pentru unități și cablul IO pentru conexiune.
Suplimentul SafeSkin este, de asemenea, inclus în pachet!
Modalități de deplasare a brațului robotului
Brațul robotului se poate deplasa din punctul A în punctul B prin conectarea a două puncte de coordonate în 4 moduri:
Mișcare interpolată a articulațiilor: mișcarea poate fi implementată utilizând GO și MoveJ, ceea ce permite brațului robot să se repoziționeze din punctul A în punctul B prin interpolarea unghiului articulației brațului robot fără a lua în considerare poziția sculei finale
Mișcarea interpolată liniar: Mișcarea poate fi implementată prin Move, care permite robotului să lege coordonatele punctului A și ale punctului B, având în vedere poziția cerului, care ghidează scula finală în linie dreaptă. În cazul mișcării liniare, se poate face o distincție între utilizarea modului de salt, în care unealta finală fie deplasează cele două puncte de coordonate în pozițiile lor finale, fie aplică o rotunjire pentru a efectua o mișcare continuă, ținând cont de coordonatele punctului.
ARC - Circular Interpolated Motion (mișcare circulară interpolată): robotul conectează punctele A și B de-a lungul unui arc de cerc folosind un punct auxiliar C, efectuând astfel o mișcare în arc de cerc, ținând cont de poziția sculei finale.
Circle - Mișcare circulară interpolată: Robotul conectează punctele A și B printr-un punct auxiliar C și execută o mișcare care descrie o formă circulară, ținând cont de poziția sculei finale.
Sisteme de coordonate
Sistemul de coordonate al sistemului brațului robotic este împărțit în patru sisteme de coordonate:
Sistemul de coordonate de bază: sistemul de coordonate de bază determină coordonatele, poziția și mișcarea sculei finale, pe baza sistemului de coordonate de bază, care este definit de sistemul de coordonate în unghi drept.
Sistemul de coordonate al articulațiilor: Sistemul de coordonate al articulațiilor este definit de mișcările posibile ale fiecărei articulații
Sistemul de coordonate al sculei finale: Sistemul de coordonate care definește distanța de decalare și unghiul de rotație, a căror origine și orientări variază în funcție de poziția piesei de prelucrat pe masa robotului.
Sistemul de coordonate al utilizatorului: Un sistem de coordonate mobil utilizat pentru a reprezenta echipamente precum dispozitive de fixare, bancuri de lucru. Orientarea originii și a axelor poate fi determinată în funcție de cerințele locului, pentru a măsura date punctuale în zona de lucru și pentru a aranja în mod convenabil sarcinile.
Puncte de singularitate
Atunci când robotul se deplasează în sistemul de coordonate carteziene, viteza rezultată a celor două axe nu poate fi în niciuna dintre direcții dacă direcțiile sunt aliniate, ceea ce duce la degradarea gradelor de libertate ale robotului. Robotul are trei puncte de singularitate.
