DOBOT COBOT CR7
Braț de robot industrial colaborativ
Dobot CR7 este un cobot industrial de dimensiuni medii, cu o dimensiune compactă și o capacitate de încărcare de 7 kg, care permite o gamă largă de automatizări ale producției cu ajutorul brațului robotic. Este disponibil cu o gamă largă de instrumente și aplicații finale, ceea ce îl face un instrument extrem de util pentru toate domeniile industriale. Este, de asemenea, un instrument excelent pentru formarea profesională, învățământul superior, depozitarea, simularea producției și multe alte aplicații.
Implementare flexibilă, implementare rapidă
Îmbunătățiți flexibilitatea fluxului de lucru și eficiența producției cu un robot colaborativ CR ușor de implementat, care poate fi configurat în doar 20 de minute și poate fi pus în funcțiune în maximum o oră.
Ușor de accesat, ușor de învățat

Software-ul și tehnologia aritmetică Dobot fac ca seria CR de roboți colaborativi să fie inteligentă și ușor de operat și gestionat. Datorită software-ului și antrenamentului manual, poate imita cu precizie mișcările umane. Nu sunt necesare cunoștințe de programare.
Sistem de siguranță avansat și multe altele
Avantajul roboților colaborativi este că sunt dotați cu senzori de presiune în carcasă, care permit robotului să oprească activitatea curentă dacă presiunea depășește un prag, iar sistemul nu va continua până când presiunea nu este eliberată. Cu acest adaos, eficiența și siguranța lucrului om-robot sunt duse la noi niveluri.
Extensibil, compatibil
Seria de roboți colaborativi CR este, de asemenea, recomandată pentru interfețele sale de comunicare universale, pe lângă gama sa largă de unelte finale. Dispunând de mai multe interfețe de I/O și de comunicare, seria de roboți robot CR este extensibilă pe scară largă și compatibilă cu o gamă largă de unelte de capăt de braț. Ca urmare, coboturile CR pot satisface o gamă largă de nevoi și pot fi utilizate într-o varietate de situații de aplicare.
Parametrii
Denumirea produsului | DOBOT CR7 |
Greutate | 24.5kg |
Sarcina maximă de lucru | 7kg |
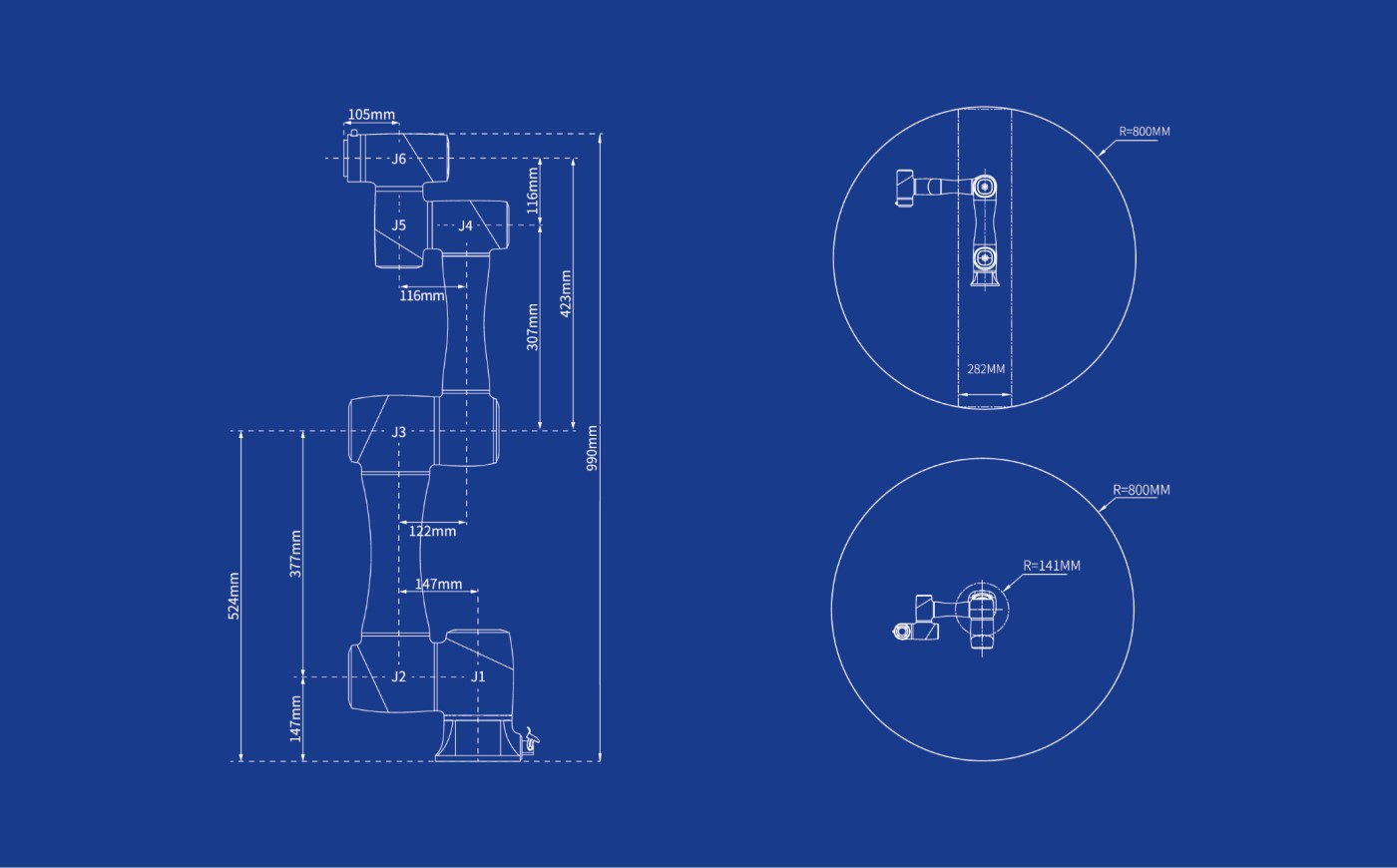
Raza maximă de lucru | 990mm |
Tensiune nominală | DC48V |
Viteza maximă a sculei finale (TCP) | 3m/s |
Intervalul de mișcare al îmbinărilor | J1 | ±360° |
J2 | ±360° |
J3 | ±160° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Viteza maximă a articulațiilor | J1/J2 | 180°/s |
J3/J4/J5/J6 | 180°/s |
Interfață I/O pentru scule finale | DI/DO/AI | 2 |
AO | 0 |
Interfață de comunicare | Comunicare | RS485 |
Controler I/O | DI | 16 |
DO/DI | 16 |
AI/AO | 2 |
ABZ Incremental Encoder | 1 |
Acuratețe repetată | ±0.02mm |
Comunicare | TCP/IP, Modbus, EtherCAT,WIFI |
Evaluarea IP | IP54 |
Temperatura de lucru | 0~45° |
Putere | 150W |
Materiale | Aluminum alloy, ABS plastic |
Unelte de capăt

Uneltele de capăt sunt dispozitivele care pot fi montate la capetele brațelor robotului. Seria de roboți colaborativi DOBOT CR este compatibilă cu o gamă largă de scule finale, astfel încât va putea satisface chiar și cele mai specifice nevoi ale afacerii dumneavoastră.
- Ambalare și paletizare
- Manipulare
- Polizare
- Înșurubare
- Lipire, alimentare și sudare
- asamblare
- Manipularea mașinilor
- CNC
- Controlul calității
- Turnarea prin injecție
Conținutul pachetului
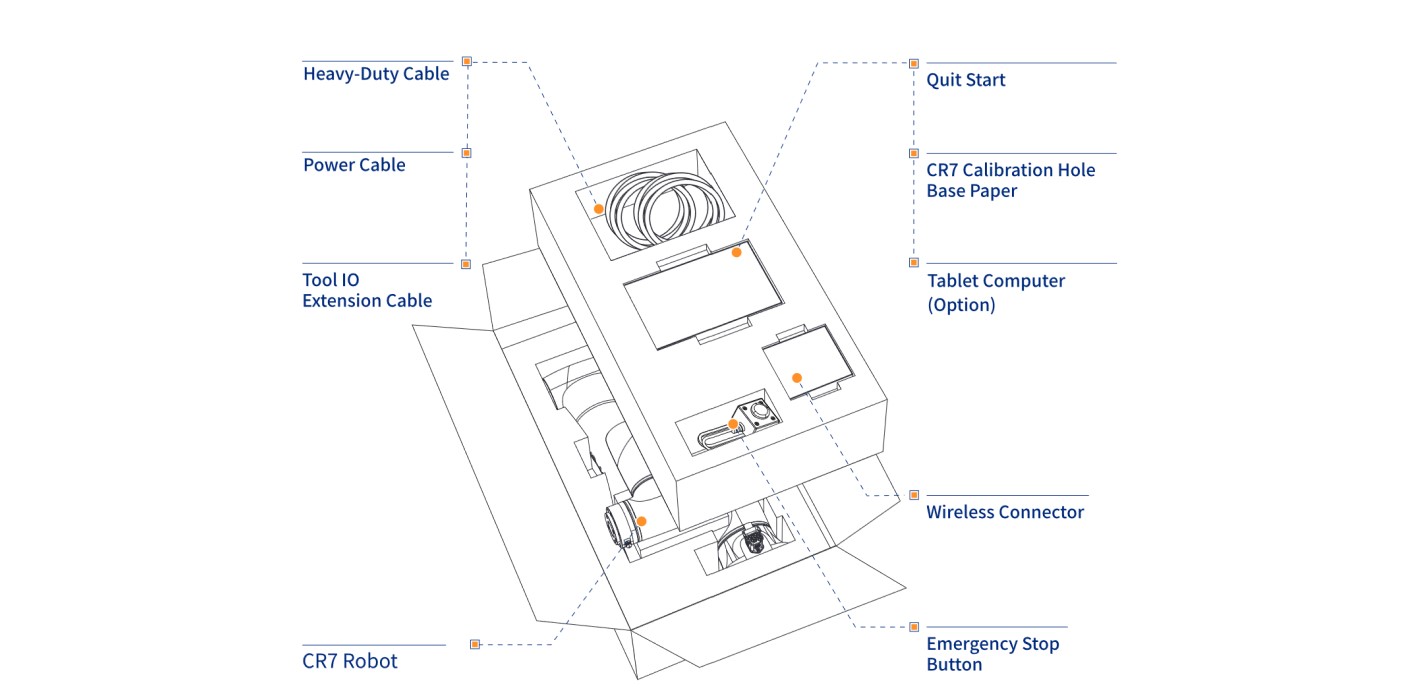
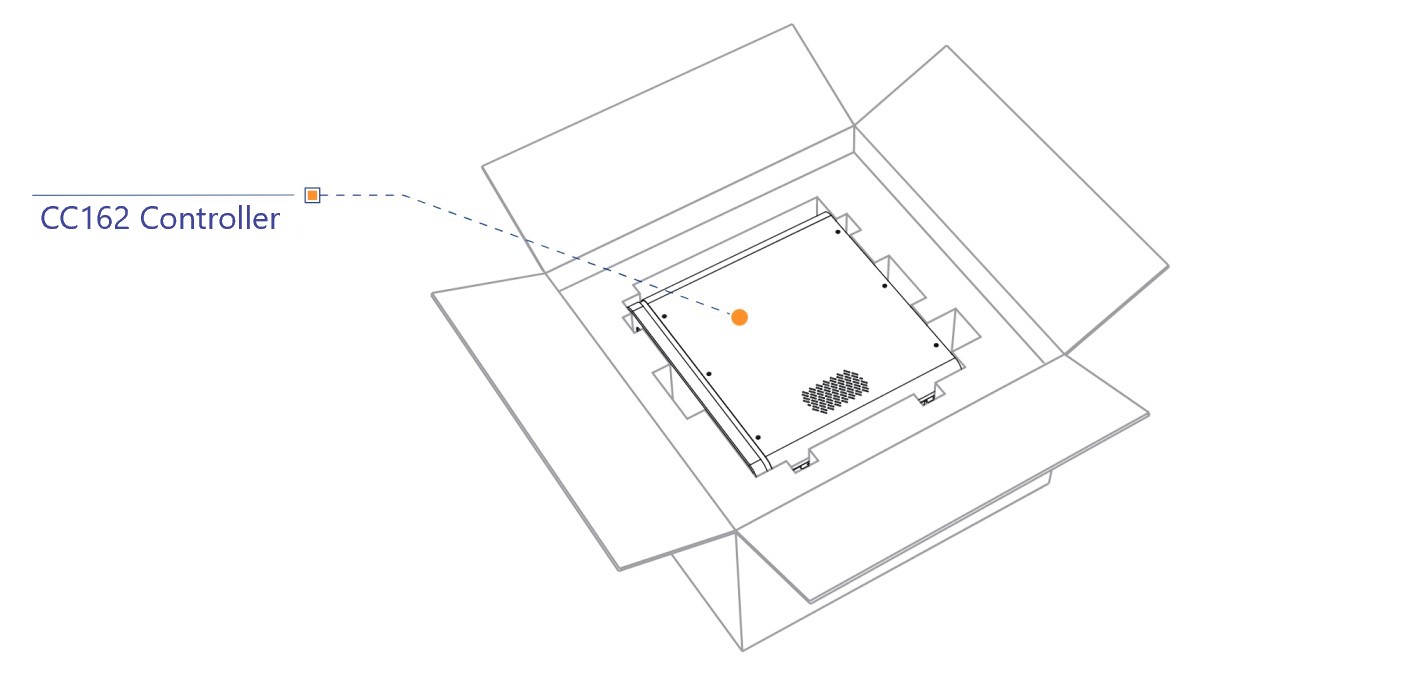
Brațul robotului este format din două unități. Un braț robotizat și o unitate de control pentru programarea acestuia. Unitatea de control conectează brațul robotului la calculator, astfel încât acesta să poată converti programele scrise în mediul de dezvoltare și să controleze brațul robot în consecință. Unitatea de control dispune de porturile IO la care pot fi conectate diverse accesorii, inclusiv întrerupătorul de oprire de urgență
* Apăsarea comutatorului de oprire de urgență va opri imediat robotul. În plus față de cele două unități, pachetul include cablurile de alimentare pentru unități și cablul IO pentru conectare.
6 axe, 4 moduri de mișcare
Brațul robotului se poate deplasa din punctul A în punctul B prin conectarea a două puncte de coordonate în 3 moduri:
Mișcare interpolată a articulației: Mișcarea poate fi implementată cu ajutorul programelor GO și MoveJ, ceea ce permite brațului robot să se repoziționeze din punctul A în punctul B prin interpolarea unghiului articulației brațului robot fără a lua în considerare poziția sculei finale
Mișcare interpolată liniar: Mișcarea poate fi implementată prin Move, care permite robotului să lege coordonatele punctului A și ale punctului B, privind poziția cerului, care ghidează scula finală în linie dreaptă. În cazul mișcării liniare, se poate face o distincție între utilizarea modului de salt, în care unealta finală fie deplasează cele două puncte de coordonate în pozițiile lor finale, fie aplică o rotunjire pentru a efectua o mișcare continuă, ținând cont de coordonatele punctului.
ARC - mișcare circulară interpolată: Robotul conectează punctele A și B de-a lungul unui arc de cerc prin intermediul unui punct auxiliar C, realizând astfel o mișcare în arc de cerc ținând cont de poziția sculei finale.
Circle - Mișcare circulară interpolată: Robotul conectează punctele A și B prin intermediul unui punct auxiliar C și își execută mișcarea prin descrierea unei forme circulare, ținând cont de poziția sculei finale.
Programarea se poate face în mai multe moduri. Printre exemple se numără:
Reproducerea mișcării de capăt de sculă: O metodă de programare conexă este programarea Teach & Playback, o modalitate de programare a brațelor robotizate care nu necesită cunoștințe de programare pentru a stabili parametrii unei sarcini. Programatorul poate mișca liber brațul robotului prin apăsarea și menținerea apăsat a unui buton de eliberare a blocării de siguranță, apoi eliberează butonul pentru a stabiliza brațul în poziția respectivă. În interfața de programare, aceste coordonate pot fi vizualizate și stocate ca punct de coordonate pe care brațul robotului trebuie să-l atingă în timpul executării unei sarcini. Prin salvarea punctelor, puteți apoi să deplasați brațul robotului fără cunoștințe de programare.
Programare pe bază de blocuri (Drag and Drop): Cunoscută și sub denumirea de programare grafică, care facilitează învățarea programării prin vizualizarea funcțiilor, variabilelor și a modurilor de operare. Principiul de funcționare se bazează pe legarea blocurilor, adică blocurile care reprezintă fiecare funcție pot fi programate în succesiune pentru a programa brațul robotului.
Script Python: în prezent, Python este unul dintre cele mai populare limbaje de programare și prima alegere a tuturor începătorilor. cu sintaxa sa ușor de înțeles și biblioteca sa mare, este utilizat nu numai pentru automatizare, ci și pentru construirea de inteligență artificială. Astfel, robotica a ales, de asemenea, Python pentru a maximiza capacitățile roboților.
DobotStudio, mediul de dezvoltare pentru brațul robotizat, vine cu bibliotecile necesare pentru a controla brațul robotizat în mod implicit, astfel încât tot ce trebuie să faceți este să consultați documentația și să creați propriul program Python pentru a rula brațul robotizat.

Sisteme de coordonate
Sistemul de coordonate al sistemului brațului robotic este împărțit în patru sisteme de coordonate:
Sistemul de coordonate de bază: sistemul de coordonate de bază definește coordonatele, poziția și mișcarea sculei finale, pe baza sistemului de coordonate de bază, care este definit de sistemul de coordonate carteziene.
Sistemul de coordonate al articulațiilor: Sistemul de coordonate al articulației este definit de mișcările posibile ale fiecărei articulații
Sistemul de coordonate al sculei de capăt: Sistemul de coordonate care definește distanța de decalare și unghiul de rotație, a căror origine și orientări variază în funcție de poziția piesei de prelucrat pe masa robotului.
Sistemul de coordonate al utilizatorului: Un sistem de coordonate mobil utilizat pentru a reprezenta echipamente precum dispozitive de fixare, bancuri de lucru. Orientarea originii și a axelor poate fi determinată în funcție de cerințele locului, pentru a măsura datele punctuale din zona de lucru și pentru a aranja în mod convenabil sarcinile.
Puncte de singularitate
Atunci când robotul se deplasează în sistemul de coordonate carteziene, viteza rezultată a celor două axe nu poate fi în niciuna dintre direcții dacă direcțiile sunt aliniate, ceea ce duce la degradarea gradelor de libertate ale robotului. Robotul are trei puncte de singularitate.
Investiție sigură, fiabilitate remarcabilă
Calitatea constructivă robustă și stabilă a seriei CR de brațe robotizate colaborative promite o durată de viață de până la 32.000 de ore, combinată cu costuri de funcționare reduse. Acest lucru face ca seria CR să fie nu numai o investiție sigură, ci și o investiție rentabilă.
