Mai mare, mai rapid, mai puternic!
Brațele robotice colaborative din seria Dobot CR au fost folosite cu succes de-a lungul anilor în automatizarea multor procese industriale. Fie că este vorba de paletizare, sudură sau asamblare, în cadrul seriei CR (CR3, CR5, CR7, CR10, CR12, CR16) puteți găsi cea mai optimă soluție pentru nevoile dvs.
Cu toate acestea, industria poate veni cu circumstanțe extreme care necesită rezistență mare, funcționare rapidă și, în același timp, conformitate strictă cu normele stricte de securitate.
Dobot a CRA sorozatot alkotta meg, mely kollaboratív robotkarok az igényekre válaszolnak. Ezek a kobotok új teljesítményszinteket érnek el, az új lendületet pedig egy időtálló konstrukció biztosítja.
Arhitectură internă îmbunătățită și viteză sporită

Datorită motoarelor servo de ultimă generație și a algoritmilor dinamici inovatori, viteza unghiulară a axelor a crescut cu 25%, iar vibrațiile observate la viteze reduse au scăzut cu 50% față de seria CR.
Sistemul de frânare a fost complet reînnoit, funcționând acum cu un sistem electromagnetic, astfel încât distanța de oprire anterioară de 10 mm a fost redusă la mai puțin de 1 mm! Mediul de lucru aglomerat nu mai reprezintă o provocare pentru brațele robotice industriale Dobot, totodată nu trebuie să vă faceți griji că robotul vă va provoca daune dumneavoastră sau colegilor dvs.
Unitate de control reînnoită, cu o gamă mai largă de sarcinir

Un element esențial al brațelor de robot colaborativ industriale Dobot este unitatea de control, care este folosită pentru programarea brațului robot și pentru atașarea diferitelor accesorii la cobotul dvs.
Noul controler CC262 are o interfață IO cu 24 de pini, iar interfața de comunicație a fost extinsă cu încă un port Ethernet și USB. În plus, controlerul suportă RS485, greutatea sa a fost redusă cu 20%, numărul protocoalelor de comunicare s-a dublat, iar nivelul de zgomot este cu 20% mai scăzut!
Software-ul de control funcționează pe versiunea 4.x, permițând continuarea dezvoltării DobotStudio Pro IDE (Integrated Developer Environment). Astfel, interfața utilizatorului devine și mai simplificată, mai ușor de utilizat și facilitează obținerea actualizărilor mai rapid.
O nouă generație, un nou model
Primul model din seria CRA își extinde posibilitățile de aplicare ale coboților nu doar cu tehnologie inovatoare, ci și cu parametri noi.
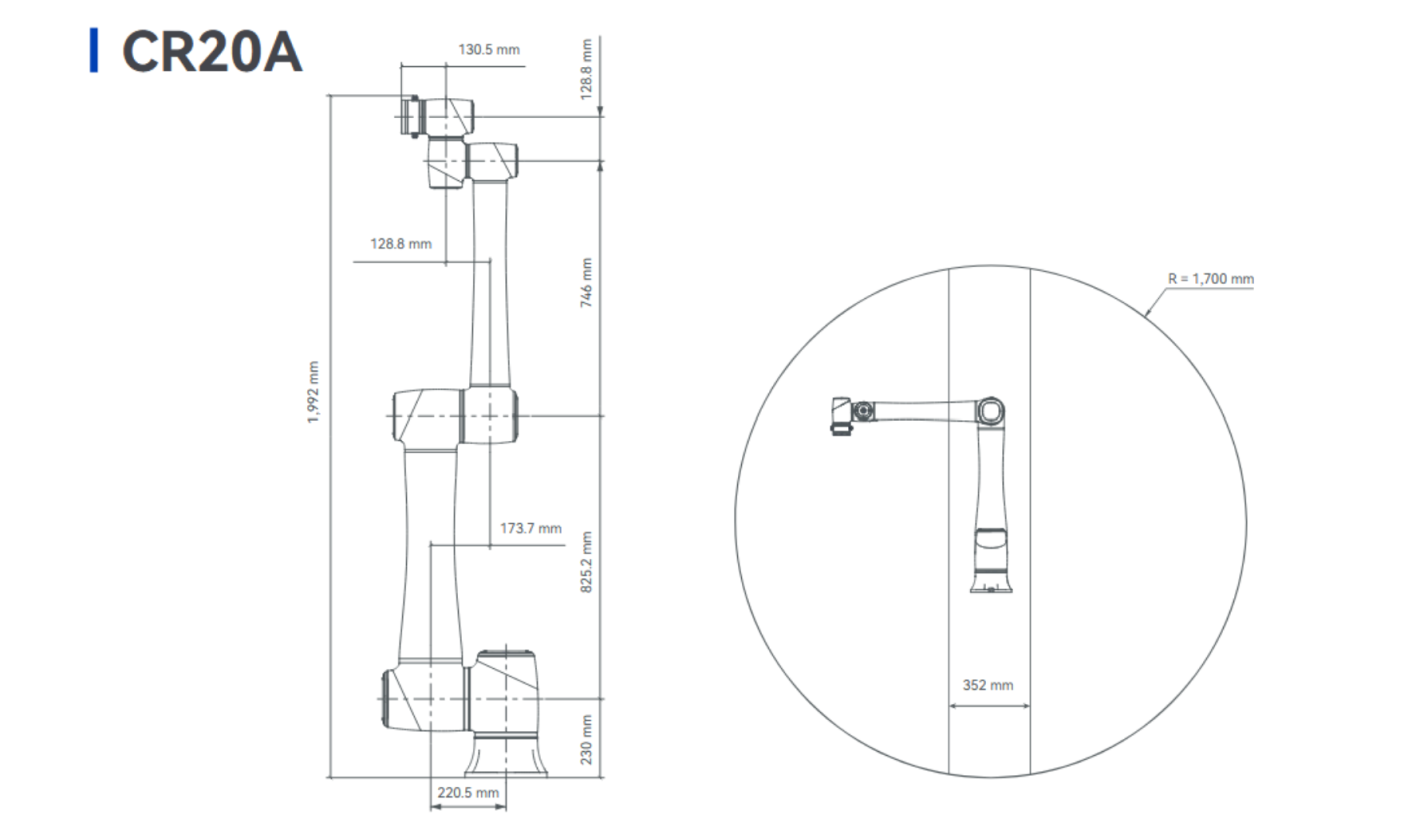
Cel mai mare membru al seriei este CR20A, care este cel mai mare robot produs de Dobot, cu o capacitate de încărcare de aproximativ 20 kg și un domeniu de acțiune de 1750 mm, deschizând astfel calea în automatizare! Cu aceasta, sarcinile de lucru mai grele și mai mari nu reprezintă o problemă în aplicațiile industriale ale sale,
Beneficiind de toate avantajele brațelor de roboți colaborativi!
Instalare flexibilă, executare rapidă
Sistemul poate fi asamblat în doar 20 de minute, conform membrilor seriei anterioare, și este gata de utilizare în maximum 1 oră.
Ușor accesibil, ușor de învățat.

Software-ul și tehnologia de aritmetică a Dobot fac operarea și manipularea brațului robotic din seria Dobot inteligente și simplificate. Datorită software-ului și instruirii manuale, acesta poate imita precis mișcările umane. Nu este nevoie de cunoștințe de programare.
Sistem de securitate avansat și multe altele
Un avantaj al roboților colaborativi este că sunt echipați cu senzori de detectare a presiunii în carcasă, astfel că atunci când presiunea depășește valoarea limită, robotul își oprește activitatea curentă și sistemul nu va continua procesul până când presiunea nu dispare. Prin această adiție, eficiența și siguranța muncii dintre om și robot pot atinge noi niveluri.
Scule de mână
Uneltele finale sunt acele unelte care pot fi atașate la capătul brațelor roboților. Seria de roboți colaborativi DOBOT CRA este compatibilă cu o gamă largă de unelte finale, ceea ce înseamnă că poate satisface chiar și cele mai speciale nevoi ale întreprinderilor. Fie că este vorba de sudură, paletizare, manipulare, șurubuire, sortare, asamblare sau control de calitate, sunt disponibile clești cu vacuum sau cu acționare electronică, unități MODBUS pentru comunicații și automatizare, sau accesorii pentru bandă rulantă și unități vizuale care ajută brațul robotic să-și atingă eficiența maximă.
Parametri
Robot armă colaborativă CR20A |
Greutate | 70 kg |
Greutatea maximă utilă | 20 kg |
Distanța maximă de acțiune | 1700mm |
Viteza maximă a numărului final de toc | 2m/s |
Raza de mișcare a articulațiilor | J1 | ±360° |
J2 | ±360° |
J3 | ±165° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Viteză maximă a articulațiilor | J1/J2 | 120°/s |
J3 | 150°/s |
J4/J5/J6 | 180°/s |
Interfața I/O | Conexiune la priză | 24V, Certificat 2A, maxim 3A |
Portok (2 conectoare) | RS485/AI, |
2x DO |
2x DI |
Precizia repetării | ±0.1mm |
Standardul IP | IP54 |
Zaj | ≤ 70 dB |
Temperatura de funcționare | 0~50°C |
Lungimea cablului de conectare a controlerului | 6 m |
Materiale | Aluminiu, plastic ABS, oțel cu fibră de carbon |
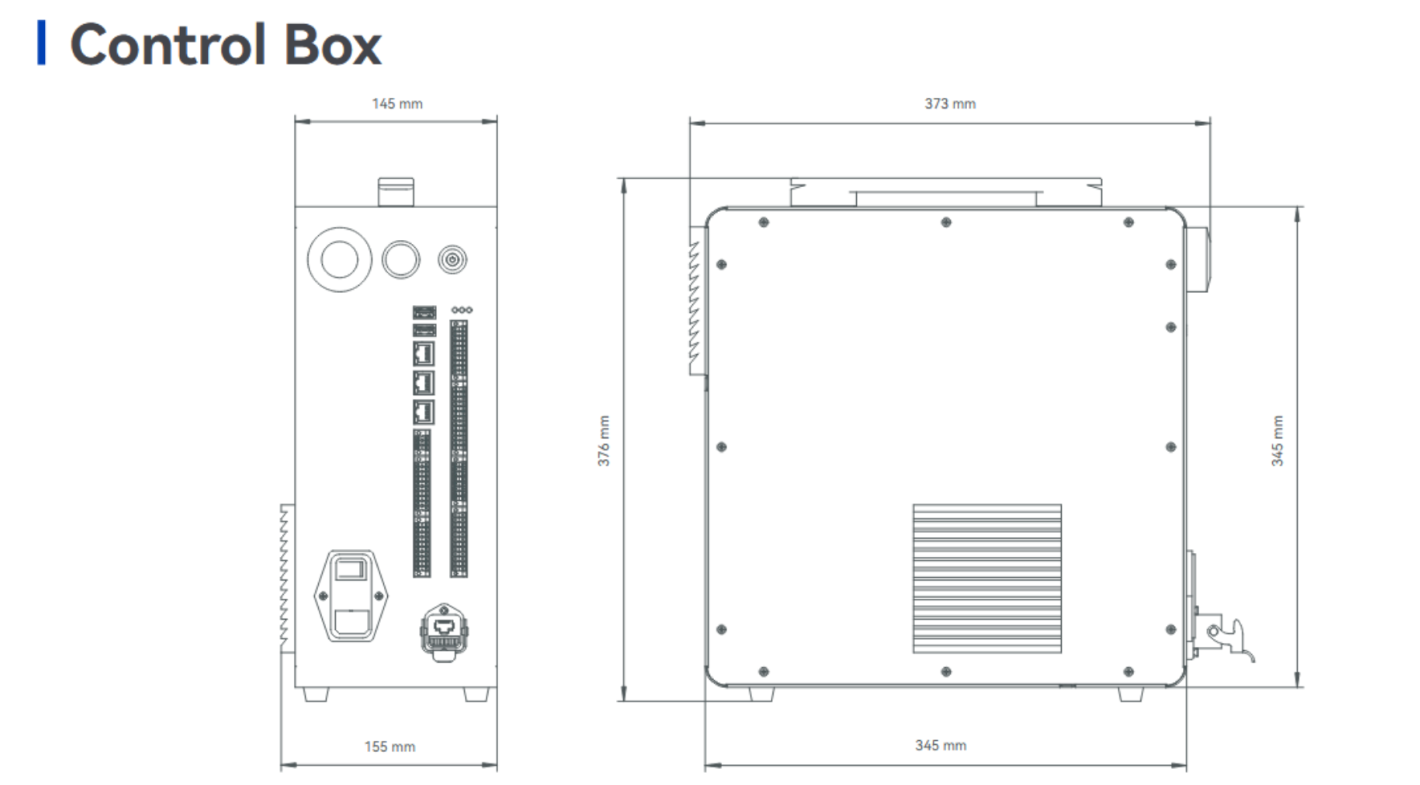
CC262 Unitate de control |
Greutate | 15 kg |
Dimensiuni (lungime x lățime x înălțime) | 400 mm x 400 mm x 175 mm |
Tensiune | 100V ~ 240V CA |
Tensiune IO | 24V, Maxim 3A, Maxim 0,5A pe fiecare canal |
Porturi I/O | DI / DO | 24 canale (NPN și PNP) |
AI / AO2 | 2 canale (în modul tensiune sau curent) |
DA / NU | 10 canale (configurabile pentru 5 caracteristici de securitate în serie) |
Interfață de comunicare | Eternet | 2 (Comunicare TCP/IP, Modbus TCP, Profinet, Ethernet/IP) |
EtherCAT | Controlând axe exterioare ale unui robot |
USB | 2 |
RS485 | 1 (Comunicare Modbus RTU) |
Condiții de funcționare | Temperatură | 0~50°C |
Conținut de umiditate | 0% - 95% (non-condensare) |
Zaj | ≤ 60 dB |
Control la distanță | Acceptat |
Clasificare IP | Original: IP20, Opțional: IP54 |
Metoda de răcire | Ventilator |
Metoda de programare | PC, smartphone (Android și iOS) |
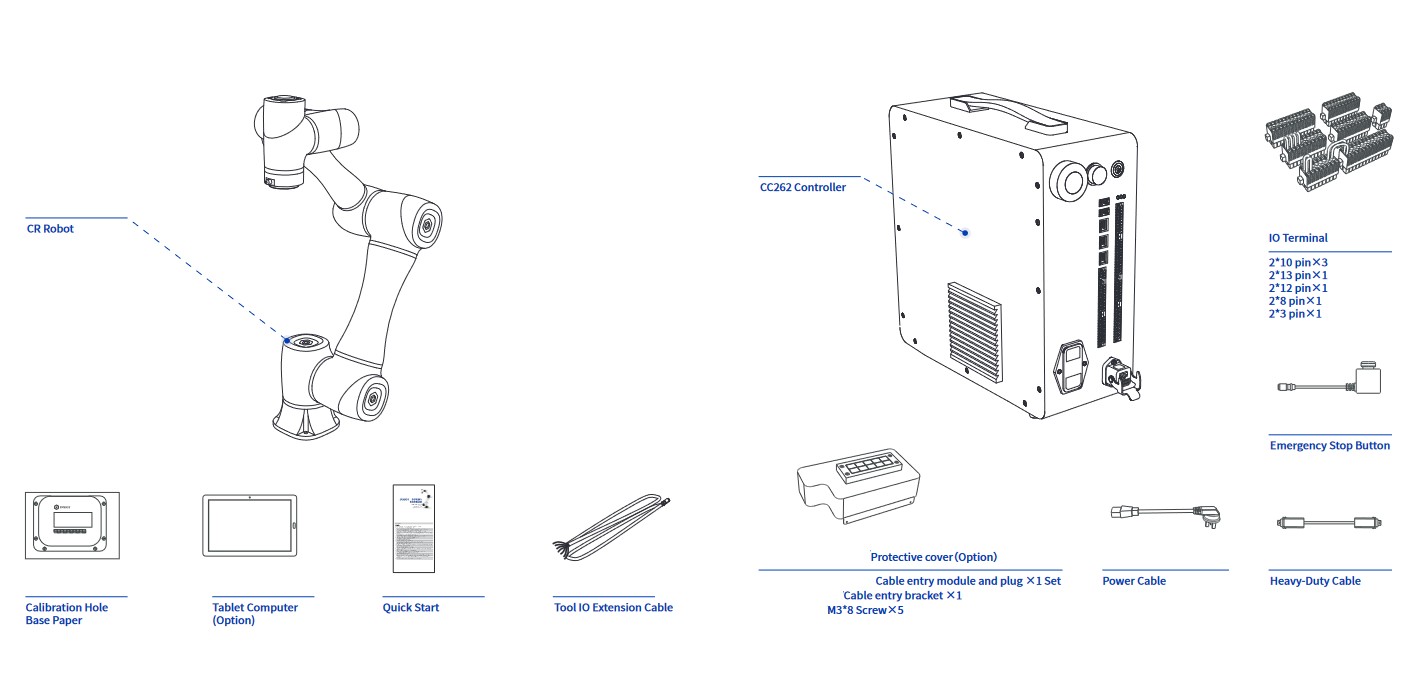
Conținutul Pachetului
6 axe, 4 moduri de mișcare
Un robot poate ajunge de la punctul A la punctul B conectând două puncte de coordonate în 4 moduri:
Mișcarea interpolată comună (Mișcare interpolată la încheietura mâinii): Mișcarea poate fi realizată cu programele GO și MoveJ, ceea ce permite robotului să-și ajusteze poziția de la punctul A la punctul B interpolând unghiurile încheieturilor brațului, fără a lua în considerare poziția finală a unei scule
Mișcarea interpolată liniar (Mișcarea Interpolată Liniar): Mișcarea poate fi realizată cu programul Move, care conectează coordonatele punctului A și punctului B, mișcând robotul și scula finală de-a lungul unei linii drepte. În cazul mișcării liniare, se poate distinge utilizarea modului de săritură, în care scula finală se mișcă între cele două puncte de coordonate sau până la poziția finală, luând în considerare coordonatele punctelor pentru a aplica rotunjirea pentru executarea mișcării continue.
ARC - Mișcare interpolată circulară: Un robot conectează punctele A și B printr-un punct auxiliar C de-a lungul unui arc, efectuând o mișcare curbată în care se ia în considerare poziția finală a uneltei
Cerc - Mișcare interpolată circulară (Mișcare interpolată circulară în formă de cerc): Un robot își desfășoară mișcarea conectând punctele A și B cu ajutorul unui punct C auxiliar pentru a descrie un cerc, având în vedere poziția finală a sculei.
Programming can be done in various ways. Some examples include:
Reproducerea mișcării unei unealte de finisat: Pentru aceasta, există modul de programare Teach & Playback, care este o metodă de programare pentru brațele robotizate, care nu necesită cunoștințe de programare pentru a seta parametrii unei sarcini. Programatorul poate mișca liber brațul robotizat ținând apăsat un buton de deblocare a siguranței, iar apoi il poate stabiliza în poziția respectivă eliberând butonul. Pe interfața programatorului, aceste coordonate pot fi vizualizate și stocate ca un punct de coordonate pe care brațul robotizat trebuie să le atingă în timpul execuției sarcinii. Prin salvarea acestor puncte, este posibilă mișcarea brațului robotizat fără a avea cunoștințe avansate de programare.
Programare bazată pe blocuri (Drag and Drop): Cunoscută și sub numele de programare grafică, aceasta facilitează învățarea programării prin vizualizarea funcțiilor, variabilelor și modurilor de lucru. Principiul sau de funcționare se bazează pe conectarea blocurilor, adică prin conectarea în serie a blocurilor care reprezintă diferite funcții, putem programa modul de funcționare al brațului robot.
Scriptul Python: Python este în prezent unul dintre cele mai populare limbaje de programare, fiind alegerea principală a programatorilor începători. Datorită sintaxei ușor de înțeles și a numeroaselor biblioteci disponibile, acesta este utilizat nu doar pentru automatizarea proceselor, ci și pentru crearea de inteligență artificială. Așadar, roboțica a ales limbajul Python pentru a maximiza capacitățile roboților.
DobotStudio, mediul de dezvoltare al bratului robot, vine cu bibliotecile necesare pentru controlul bratului robot in mod implicit, astfel incat singurul lor lucru este sa consulte documentatia si sa creeze propriul lor program Python pentru functionarea bratului robot.

Sisteme de coordonate
Sistemul de coordonate al roboților este împărțit în patru sisteme de coordonate:
Sistemul de coordonate de bază: Sistemul de coordonate de bază determină coordonatele, poziția și mișcarea unei scule la capăt, în funcție de sistemul de coordonate de bază stabilit de un sistem de coordonate dreptunghiular.
Sistemul de coordonate al încheieturii: Sistemul de coordonate al încheieturii determină posibilitățile de mișcare ale fiecărei încheieturi
Sistemul de coordonate a instrumentului final: Sistemul de coordonate care determină distanța de deplasare și unghiul de rotație, având originea și orientările variabile în funcție de poziția piesei de lucru de pe placa robotului
Sistem de coordonate utilizator: Un sistem de coordonate mobil folosit pentru reprezentarea echipamentelor cum ar fi obiectele de mobilier, bancuri de lucru. Orientearea originii și axelor poate fi determinată în funcție de cerințele site-ului pentru măsurarea datelor punctuale în cadrul zonei de lucru și pentru a aranja comod sarcinile.